Insinöörimatematiikkaa tiivistettynä
Jarno Elonen <elonen@iki.fi>, 31.5.2007 (versio 1.2)
Hyvä lukija,
Olen kirjoittanut nämä muistiinpanot alunperin itselleni ja julkaisen ne nyt yksinkertaisesti siltä varalta, että niistä sattuisi olemaan jollekulle muullekin jotain iloa.
Kyseessä ei ole oppikirja vaan asioita on jätetty pois, oiottu ja yksinkertaistettu sen mukaan miten olen niitä itse katsonut tarvitsevani ja kuinka hyvin olen muistanut asiat entuudestaan. Tarkoituksena on ollut lähinnä luetteloida erilaisten ongelmien ratkaisutapoja käytännön (tietotekniikka-)insinöörintyötä ajatellen eikä niinkään osoittaa tai johtaa niitä. En myöskään väitä ymmärtäväni kaikkea kirjoittamaani – mikä on tietysti harmi, sillä matematiikka on kiinnostavaa vaikka ainakin itselläni muut työt ovat aina vieneet ajan ja energian paneutua siihen kunnolla.
Tekstiä saa kopioida, muokata ja vaikka myydä vapaasti kunhan minut mainitaan alkuperäisen version toimittajana ja kerrotaan, että alkuperäinen on vapaasti kopioitavaa materiaalia. Uusin versio löytyy osoitteesta:
http://iki.fi/elonen/articles/insimat/
Valituksille finglishistä ja muista muotoseikoista en luultavasti lotkauta korvaanikaan ellei valitusten mukana tule korjaustiedostoa, sillä tämän dokumentin päivittämiseen käytetty aika on aina pois muilta töiltä. Tekstiin on epäilemättä kuitenkin jäänyt myös varsinaisia asiavirheitä – niistä saa mielellään huomauttaa sähköpostitse. GNU Diff:llä muodostetut korjaustiedostot suoraan .tm-tiedostoon ovat tietysti vieläkin tervetulleempia.
–
Jarno Elonen
Sisältö
Sisältö 6
1Lineaarialgebra 6
1.1Matriisien perusteet 6
1.1.1Tulo 6
1.1.2Käänteismatriisi 7
1.1.3Lineaarialgebran derivointisääntöjä 7
1.1.4Gaussin eliminaatio 7
1.1.5Determinantti 8
1.1.6Kanta 9
1.1.7Gram-Schmidt-ortonormalisointi 9
1.1.8Ominaisarvot ja -vektorit (eigenvalues & vectors) 9
1.1.9Matriisifunktiot 10
1.2Vektorit ja analyyttinen geometria 10
1.2.1Vektoritulot 10
1.2.2Suora 11
1.2.3Taso 11
1.2.4Tetraedri 11
1.2.5Projektio 12
1.3Homogeeniset koordinaatit 12
1.3.1Ideaalipisteet, -suorat ja tasot 12
1.3.2Duaalisuus ja lauseiden dualisointi 12
1.4Kuvaukset (transformaatiot) 12
1.4.1Lineaarikuvaus 12
1.4.2Affiniteetti (affinikuvaus) 13
1.5Matriisien sekalaisia sovelluksia 13
1.5.1Pienimmän neliösumman sovitus (least squares fit) 13
1.5.2Markovin ketjut 13
2Differentiaalilaskentaa yleisesti 14
2.1Differentiaali 14
2.2Jacobian-matriisi 14
2.3Monen muuttujan ketjusääntö 14
3ODEt - ”tavalliset” differentiaaliyhtälöt 15
3.1Peruskäsitteitä 15
3.2Yksittäisen ODEn tarkka ratkaiseminen 15
3.2.1Separoituva: integrointi puolittain 15
3.2.2Tasa-asteinen: muuttujan vaihto 15
3.2.3Eksakti: osittaisderivointi 15
3.2.4Eksaktiksi muuttaminen: integroiva tekijä 16
3.2.51. kertaluvun lineearinen ODE: yleinen ratkaisu 16
3.3Yksittäisen yhtälön likiarvoratkaisut 16
3.3.1Suuntakenttä - erikoisratkaisu graafisesti 16
3.3.2Picardin iteraatio - approksimoiva algebrallinen erikoisratkaisu 16
3.42. asteen ODE 17
3.51. asteen lineearinen homogeeninen ODE-ryhmä 17
3.5.1Vaihekuvaaja 17
3.6Laplace-muunnos 18
4Sarjat 19
4.1Suppenemisen testaus 19
4.2Yleisimpiä sarjoja 20
4.3Potenssisarjat 20
4.4Fourier-sarja 20
5Monen muuttujan analyysi 21
5.1Avaruuspinta 21
5.2Raja-arvo 21
5.3Monen muttujan funktion differentiaalit 21
5.3.1Osittaisderivaatta 21
5.3.2Gradientti ja suunnattu derivaatta 21
5.4Napakoordinaatisto 22
5.5Monen muuttujan ääriarvotehtävät 22
5.5.1Ääriarvopisteiden luokittelu (Hessian) 22
5.5.2Rajoitetut ääriarvotehtävät (Lagrange-kertoimet) 22
6Skalaari- ja vektorikentät 22
6.1Viivaintegraali 23
6.1.1Greenin lause (suljetun käyrän viivaintegraali) 23
6.1.2Stokesin lause (moniulotteiset pinnat) 24
6.2”Vektoriderivaatat” - grad, div, curl 24
6.3Divergenssilause (aka. Gaussin laki) 24
7Kompleksiluvut 26
7.1Kompleksiset funktiot 26
8Abstrakti algebra 27
8.1Ryhmät (groups) ja monoidit (monoids) 27
8.2Renkaat (ring) ja kunnat (field) 28
8.3Polynomirenkaat 29
8.4Kooditeoria 30
9Kombinatoriikka 31
9.1Permutaatiot ja kombinaatiot 31
9.2Inkluusio-ekskluusio-periaate 31
9.3Binomi- ja multinomikertoimet 32
9.4Generoivat funktiot eli emäfunktiot 32
9.5Tornipolynomit (rook polynomials) 34
9.6Differenssiyhtälöt eli rekursiot 35
9.6.1Lineaariset ja vakiokertoimiset 35
9.6.2Ratkaisu emäfunktioilla 36
9.7Permutaatioryhmät ja ekvivalenssiluokat 36
10Jaollisuus ja moduloaritmetiikka 39
10.1Jaollisuussääntöjä 39
10.1.1Suurin yhteinen tekijä (GCD) ja pienin yhteinen jaettava (LCM) 39
10.1.2Lineaariset Diophanteen yhtälöt 40
10.2Kongruenssi eli moduloaritmetiikka 40
10.3Suuret alkuluvut 41
10.3.1RSA-salakirjoitus 41
11Graafit 42
11.1Lauseita 42
11.2Algoritmeja (ei-negatiivisesti) painotetuille graafeille 43
11.3Kaksijakoinen graafi (bipartite graph) 43
12Sekalaisia laskutekniikoita 44
12.1Induktiotodistus 44
12.2Neliöksi täydentäminen 44
12.3Osamurtokehitelmä 45
12.3.1Tapa 1:  :n
valitseminen strategisesti 46
:n
valitseminen strategisesti 46
12.3.2Tapa 2: yhtälöryhmä eri asteisista termeistä 46
12.3.3Tapa 3: Heavisiden peittomenetelmä 46
12.4Logaritmi 47
12.5Raja-arvo 47
12.6Trigonometristen funktioiden ominaisuuksia 48
13Merkintätapoja 48
13.1Tavalliset lukujärjestelmät 48
13.2Kreikkalaiset kirjaimet 48
Hakemisto 49
1Lineaarialgebra
Tässä kappaleessa käsitellään lähinnä
reaalisia avaruuksia  mutta suurin osa kohdista
pätee myös myös kompleksisille avaruuksille tai vaikka
alkiot olisivat funktioita (funktioavaruus).
Oleellista on vain, että alkiot toteuttavat lineaarialgebran
aksioomat, joiden mukaan mm. täytyy
löytyä nolla-alkio ja ykkösalkio, jokaiselle alkiolle
täytyy olla vasta-alkio, alkion kertominen skalaarilla täytyy
kommutoida yms.
mutta suurin osa kohdista
pätee myös myös kompleksisille avaruuksille tai vaikka
alkiot olisivat funktioita (funktioavaruus).
Oleellista on vain, että alkiot toteuttavat lineaarialgebran
aksioomat, joiden mukaan mm. täytyy
löytyä nolla-alkio ja ykkösalkio, jokaiselle alkiolle
täytyy olla vasta-alkio, alkion kertominen skalaarilla täytyy
kommutoida yms.
1.1Matriisien perusteet
-
transpoosi
 on
on  :n peilaus diagonaalin
(lävistäjän) suhteen
:n peilaus diagonaalin
(lävistäjän) suhteen
-
säännöllinen vs.
singulaarinen matriisi: on olemassa
käänteismatriisi vs. ei ole olemassa. Älä sekoita
säännöllistä ja symmetristä
(ts.
 ).
).
-
ortogonaalinen matriisi:
 (pystyvektorit ovat kohtisuorassa eli ortogonaaliset)
(pystyvektorit ovat kohtisuorassa eli ortogonaaliset)
- ortonormeeratut vektorit: toisiaan vastaan kohtisuorassa (ortogonaalimatriisi) ja normit (pituus) ovat 1
-
rangi tai rankki
(rank) eli
säännöllisyysaste:
yhtälöryhmän ratkaisun ei-vapaiden muuttujien
määrä eli Gaussin eliminaation tuloksen
 yksikköneliömatriisin
yksikköneliömatriisin  koko.
koko.
-
lineaarikuvaus on funktio, jolle a)
 ja b)
ja b)  ja koska molemmat
pitävät paikkansa matriisikertolaskussa:
ja koska molemmat
pitävät paikkansa matriisikertolaskussa:  kun
kun  .
.
-
lineaarikuvauksen ydin (kernel)
on
 :n ratkaisujoukko.
:n ratkaisujoukko.
-
avaruuden dimensio: vapaiden muuttujien
määrä, esim.
 :lle 2 ja
:lle 2 ja  3.
3.
- lineaarikombinaatio tai -yhdistely on vektoreiden painotettu summa. Älä sekoita lineaarikombinaatiota lineaarikuvauksen kanssa!
-
kanta:
 kappaletta
avaruuden lineaarisesti riippumatonta vektoria
(mitkä tahansa). Sanonta: "koordinaatit kannan
kappaletta
avaruuden lineaarisesti riippumatonta vektoria
(mitkä tahansa). Sanonta: "koordinaatit kannan  suhteen".
suhteen".
-
luonnollinen kanta: avaruuden
vektorit
 (eli tavallinen koordinaatisto).
(eli tavallinen koordinaatisto).
-
matriisin normi on mikä tahansa eräät ehdot täyttävä skalaari-”mittari” matriisille. Tässä kolme tärkeintä (vastaavista vektorinormeista johdettua) matriisinormia:



1.1.1Tulo
Matriisien tulo tapahtuu "kertomalla rivit
sarakkeisiin" ja  :ssä,
:ssä,  :n korkeus on :n korkeus ja leveys
:n leveys. Jos :n leveys
:n korkeus on :n korkeus ja leveys
:n leveys. Jos :n leveys
 :n korkeus, tulo on
määrittelemätön. Esim:
:n korkeus, tulo on
määrittelemätön. Esim:

Toisin sanoen: matriisi vektori -operaatio on siis
matriisin leveys -kokoisen vektorin kuvaus matriisin
korkeus -kokoiseksi vektoriksi.
vektori -operaatio on siis
matriisin leveys -kokoisen vektorin kuvaus matriisin
korkeus -kokoiseksi vektoriksi.
Pystyvektorien pistetulo  cos(
cos(
1.1.2Käänteismatriisi
Määritelmä:  . Vain
neliömatriiseilla voi olla käänteismatriisi ja
niilläkin vain joss sarakkeet/rivit ovat
lineaarisesti rippumattomia (sama asia). Sääntöjä:
. Vain
neliömatriiseilla voi olla käänteismatriisi ja
niilläkin vain joss sarakkeet/rivit ovat
lineaarisesti rippumattomia (sama asia). Sääntöjä:

Käänteismatriisin voi laskea Gauss-Jordan-algoritmilla (ks. alempana)...
...tai hitaasti determinantin (ks. alempana) avulla (Cramerin sääntö):

2x2-kokoiselle matriisille Cramerin sääntö tosin on
vielä selvästi helpompi:  .
.
1.1.3Lineaarialgebran derivointisääntöjä
Perussääntöjä:



Matriisilausekkeiden derivaattoja vektorin
suhteen:
 |
 |
|
  |
 |
|
 |
|
|
 |
 |
|
 |
 |
|
 |
 |
|
 |
 |
1.1.4Gaussin eliminaatio
Yhtälöryhmä  kirjoitetaan
matriisiksi...
kirjoitetaan
matriisiksi...

...ja väännetään sitten yläkolmiomuotoon vähentämällä "nykyinen" rivi alemmista riveistä aina kerrottuna ylänurkan sopivasti kerrotulla tukialkiolla...

...ja soveltamalla sitten alhaalta ylöspäin peräkkäisiä sijoituksia tai toistamalla eliminointi alhaalta ylös, jolloin saadaan yksikkömatriisi (kuten Gauss-Jordan:ssa). Huom:
- rivin vaihto ei muuta tulosta
-
sarakkeen vaihto muuttaa muuttujien järjestystä
 kirjanpito tarpeen
kirjanpito tarpeen
-
Tulosrivi
 EI tarkoita,
että ryhmä olisi ratkaisematon vaan se poistetaan ja
tulkitaan jäljelle jääneitä rivejä
yhtälöryhmänä
EI tarkoita,
että ryhmä olisi ratkaisematon vaan se poistetaan ja
tulkitaan jäljelle jääneitä rivejä
yhtälöryhmänä
-
Ristiriitainen tulosrivi (esim.
 )
tarkoittaa ratkaisematonta ryhmää
)
tarkoittaa ratkaisematonta ryhmää
-
Jos tuloksia on äärettömästi, esitetään
ratkaisu vapaan muuttujan (tai useamman) avulla:

1.1.5Determinantti
Determinantti on neliömatriisin vektorien
määräämän suoran/suunnikkaan/särmiön
pituus/ala/tilavuus (ja vastaava luku moniulotteisemmille avaruuksille).
Yksinkertaisin tapaus,  -determinantti on helppo
laskea:
-determinantti on helppo
laskea:  . Yleisiä
sääntöjä:
. Yleisiä
sääntöjä:
- rivin/sarakkeen vaihto muuttaa etumerkin
-
determinantin kertominen skalaarilla kertoo yhden rivin tai sarakkeen:
 ja esim.
ja esim.  jne.
jne.
-
rivin/sarakkeen lisääminen toiseen skaalattuna ei muuta
tulosta (Gauss toimii)
-
transponointi ei muuta determinanttia (ts.
 )
)
-

-
 sarakkeet/rivit ovat lin. riippumattomiaon olemassa käänteismatriisi
sarakkeet/rivit ovat lin. riippumattomiaon olemassa käänteismatriisi
Ison determinantin voi laskea vääntämällä se Gaussin algoritmilla yläkolmiomuotoon ja laskemalla lävistäjän tulo...

...tai hitaammin alideterminanttikehitelmän avulla minkä tahansa rivin tai sarakkeen suhteen...

...missä termien etumerkit määräytyvät elementin koordinaateista näin:
Vektorien ristitulo  =|
=| |sin(
|sin( , missä
, missä  .
.
1.1.6Kanta
Avaruuden kanta
(koordinaatisto) muodostuu mistä tahansa :stä,
lineaarisesti riippumattomasta vektorista. Luonnollinen
kanta on "tavallinen koordinaatisto"  . Kannan vaihto luonnollisesta kantaan
. Kannan vaihto luonnollisesta kantaan  on...
on...

...eli tehdään kantamatriisi
pystyvektoreista  ja ratkaistaan
ja ratkaistaan
 - tai jos halutaan kannanvaihtomatriisi,
lasketaan :n käänteismatriisi.
- tai jos halutaan kannanvaihtomatriisi,
lasketaan :n käänteismatriisi.
1.1.7Gram-Schmidt-ortonormalisointi
Kanta on ortonormaali, jos sen kaikki vektorit
ovat kohtisuorassa toisiaan vastaan ja jokainen vektorin on  :n mittainen (kuten luonnollisella kannalla). Minkä
tahansa kannan voi pakottaa ortonormaaliksi Gram-Schmidt
ortonormalisointi-algoritmilla. Sitä
käytetään erityisesti numeerisessa laskennassa hieman
”epävireeseen” menneen kannan korjaamiseen.
Merkitään alkuperäisiä vektoreita
:n mittainen (kuten luonnollisella kannalla). Minkä
tahansa kannan voi pakottaa ortonormaaliksi Gram-Schmidt
ortonormalisointi-algoritmilla. Sitä
käytetään erityisesti numeerisessa laskennassa hieman
”epävireeseen” menneen kannan korjaamiseen.
Merkitään alkuperäisiä vektoreita  ja uusia
ja uusia  :
:
-
merkitään
 ja
ja  ja aloitetaan kohdasta 3
ja aloitetaan kohdasta 3
-
vähennetään
 :nnestä
vektorista kaikkien jo ortonormalisoitujen vektorien projektio:
:nnestä
vektorista kaikkien jo ortonormalisoitujen vektorien projektio: 
-
normalisoidaan :s vektori:

-
Lisätään :tä yhdellä
eli siirrytään seuraavaan vektoriin. Jos
 ,
jatketaan kohdasta 2.
,
jatketaan kohdasta 2.
1.1.8Ominaisarvot ja -vektorit (eigenvalues & vectors)
Neliömatriisin ominaisarvon määritelmä:  , eli koska :lla
transformointi ei muuta ominaisvektorin suuntaa (paitsi ehkä negatoi),
transformaation voi (kaikille
, eli koska :lla
transformointi ei muuta ominaisvektorin suuntaa (paitsi ehkä negatoi),
transformaation voi (kaikille  :n suuntaisille
vektoreille) tiivistää skalaariksi:
ominaisarvoksi
:n suuntaisille
vektoreille) tiivistää skalaariksi:
ominaisarvoksi  . Koska
. Koska  , löytää ominaisarvot ratkaisemalla
, löytää ominaisarvot ratkaisemalla
 ja -vektorit ratkaisemalla tuloksen perusteella
yhtälöryhmä
ja -vektorit ratkaisemalla tuloksen perusteella
yhtälöryhmä  . Siis:
. Siis:
-
laske
 eli :stä
riippuva :n karakteristinen
polynomi
eli :stä
riippuva :n karakteristinen
polynomi
-
ratkaise polynomin juuret (eli :n ominaisarvot)
-
muodosta (nyt tunnetuista) ominaisarvoista yhtälöryhmät
 ja ratkaise
ja ratkaise  :t (Huom:
matriisi
:t (Huom:
matriisi  on singularinen, joten :t eivät ole yksiselitteisiä, vaan ne voi
skaalata mielivaltaisella vakiolla)
on singularinen, joten :t eivät ole yksiselitteisiä, vaan ne voi
skaalata mielivaltaisella vakiolla)
Matriisin on diagonalisoituva, jos sillä on
ominaisarvoa. Diagonalisoitu matriisi on koottu
ominaisarvoista:  . Vastaavasti sen
similariteettimuunnos(-matriisi) on koottu
ominais(pysty)vektoreista
. Vastaavasti sen
similariteettimuunnos(-matriisi) on koottu
ominais(pysty)vektoreista  . Matriisit ja ovat similaariset, jos on olemassa
. Matriisit ja ovat similaariset, jos on olemassa  siten, että
siten, että  , joten ja
, joten ja  ovat aina similaariset:
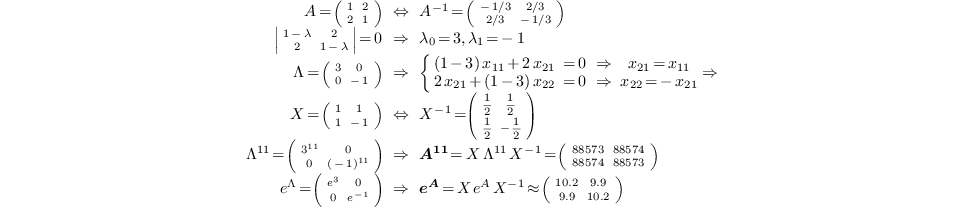
ovat aina similaariset:  . Esimerkki
ominaisarvojen laskemista, diagonalisoinnista ja similaarisuuden
hyödyntämisestä on seuraavassa kappaleessa.
. Esimerkki
ominaisarvojen laskemista, diagonalisoinnista ja similaarisuuden
hyödyntämisestä on seuraavassa kappaleessa.
1.1.9Matriisifunktiot
Matriisifunktiot on määritelty  -neliömatriisille
seuraavasti:
-neliömatriisille
seuraavasti:

...josta  :t voi laskea ominaisarvojen avulla,
sillä:
:t voi laskea ominaisarvojen avulla,
sillä:

Toisaalta, jos ominaisarvot eivät ole moninkertaisia (onko välttämätön ehto?), voi saman laskea diagonalisoinnin avullakin:

Tällä tavalla voidaan laskea esim.
matriisieksponentti  ,
,  , mielivaltaisen suuri matriisipotenssi
, mielivaltaisen suuri matriisipotenssi  tai vaikka neliöjuurimatriisi (
tai vaikka neliöjuurimatriisi ( ).
Esimerkki:
).
Esimerkki:
Huom: matriisin derivaatta ja integraali lasketaan kuitenkin ottamalla ne erikseen jokaiselle alkiolle.
1.2Vektorit ja analyyttinen geometria
1.2.1Vektoritulot
-
Pistetulo eli skalaaritulo eli sisätulo
 cos(
cos( .
.
-
Yhdensuuntaisuus:

-
Skalaariprojektio:
 :n pituus
:n pituus  :llä on
:llä on  .
.
-
Yhdensuuntaisuus:
-
Ristitulo eli vektoritulo
 on
määritelty vain 3-vektoreille:
on
määritelty vain 3-vektoreille:
(Huom: sanotaan, että ristitulomatriisi
 saadaan :sta
ristioperaattorilla)
saadaan :sta
ristioperaattorilla)

-
Suunnikkaan ala:
 , kolmion
ala =
, kolmion
ala =  .
.
-
Suunnikkaan ala:
-
Särmiön tilavuus:
 , tetraedrin
tilavuus:
, tetraedrin
tilavuus:  .
.
Huom: alat voi laskea myös determinantilla:
 .
.
 .
.
1.2.2Suora
-
Parametrimuoto:
 ,
missä
,
missä  on suoran suunta
on suoran suunta
-
Normaalimuoto: koska jokainen
 :sta
pisteeseen johtava vektori on kohtisuorassa normaalia vastaan, on
:ssa:
:sta
pisteeseen johtava vektori on kohtisuorassa normaalia vastaan, on
:ssa:
 eli
eli  eli
eli  , missä
, missä  ovat
ovat  :n komponentit ja
:n komponentit ja  on
normaalin ja
on
normaalin ja  :n pistetulo (eli :n projektio :lle, suoran
siirto origosta
:n pistetulo (eli :n projektio :lle, suoran
siirto origosta ).
).
-
Painopistekoordinaatit:
 , missä
, missä 
Jos
 , piste on :n ja
, piste on :n ja
 :n välissä. Keskipisteessä
:n välissä. Keskipisteessä
 .
.
- Suoraparvi on usemman suoran ryhmä ja suoraviuhka kulkee tietyn pisteen läpi.
-
Avaruudessa
 suoran voi esittää
parametrimuodossa tai kahden tason leikkauksena:
suoran voi esittää
parametrimuodossa tai kahden tason leikkauksena:

1.2.3Taso
-
Parametrimuoto:
 ,
missä tietysti
,
missä tietysti 
-
Normaalimuoto: koska jokainen
:sta
pisteeseen johtava vektori on kohtisuorassa normaalia vastaan, on
(:ssa!): eli  eli
eli
 , missä
, missä  ovat :n komponentit ja
ovat :n komponentit ja  on normaalin ja :n pistetulo.
on normaalin ja :n pistetulo.
-
Painopistekoordinaatit: vektoreilla
 tai
tai  , missä
, missä  .
.
Annetun pisteen sijainnin
 -pisteiden
muodostamaan kolmioon nähden voi päätellä
painokertoimien merkistä - kolmion sisällä se on
"
-pisteiden
muodostamaan kolmioon nähden voi päätellä
painokertoimien merkistä - kolmion sisällä se on
" ". Kolmion
painopisteessä
". Kolmion
painopisteessä  .
.
1.2.4Tetraedri
- Tetraedrissä on 4 tahkoa ja 4 kärkipistettä ("kolmiopohjainen pyramidi"):
-
Kun kärkipisteistä
 johdetaan kolme
särmävektoria
johdetaan kolme
särmävektoria  saadaan sekä
kanta, että auki kertomalla painopistekoordinaattiesitys:
saadaan sekä
kanta, että auki kertomalla painopistekoordinaattiesitys:
 , missä
, missä  . Kuten
3D-tason ja 2D-suoran tapauksissakin, painopisteessä on
. Kuten
3D-tason ja 2D-suoran tapauksissakin, painopisteessä on  ja annetun pisteen paikan tetraedrin suhteen voi
päätellä
ja annetun pisteen paikan tetraedrin suhteen voi
päätellä  :n etumerkeistä
– tetraedrin sisällä se on "
:n etumerkeistä
– tetraedrin sisällä se on " ".
".
1.2.5Projektio
-
Yhdensuuntaisprojektion
määrittää projektiotason
normaali ja
projektiosäteiden suuntavektori
 . Laskukaava:
. Laskukaava:  tai matriisina
tai matriisina  .
.  on yhdensuuntaisprojektio
joss
on yhdensuuntaisprojektio
joss  .
.
-
Jos suuntavektori on lisäksi kohtisuorassa tasoon nähden, on
kyseessä ortogonaalinen projektio (joss
 ).
).
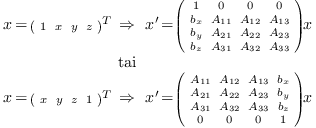
1.3Homogeeniset koordinaatit
projektiivinen taso, projektiivinen avaruus, Pappuksen lause, projektiviteetti, kiintopiste
Euklidisen tason pistettä  vastaa projektiivisen tason
vastaa projektiivisen tason  piste, eli homogeeninen koordinaatti
piste, eli homogeeninen koordinaatti  . Grafiikkakirjoissa ylimääräinen
("nollas") elementti kirjoitetaan usein viimeiseksi: [x,y,w].
. Grafiikkakirjoissa ylimääräinen
("nollas") elementti kirjoitetaan usein viimeiseksi: [x,y,w].
Sekä affinitransformaatiot (siirto, peilaus, rotaatio, skaalaus,
skew) että projektio ovat homogeenisissa
koordinaateissa palautettavissa (projektiossa  aiheuttaa tavallisen pisteen muuttumisen idaalipisteeksi,
aiheuttaa tavallisen pisteen muuttumisen idaalipisteeksi,  ideaalipisteen muuttumisen tavalliseksi ja lopuissa
ideaalipisteen muuttumisen tavalliseksi ja lopuissa  koodautuu
koodautuu  :hen) –
siitäkö lienee nimi "projektiivinen taso"? Molemmat
voidaan esittää esim.
:hen) –
siitäkö lienee nimi "projektiivinen taso"? Molemmat
voidaan esittää esim.  :n tapauksessa
:n tapauksessa
 -matriisilla.
-matriisilla.
1.3.1Ideaalipisteet, -suorat ja tasot
Pystyvektorilla esitetään pisteitä ja vaakavektorilla
(transponoiduilla) suoria:  . Suoran tavallinen
yhtälö on
. Suoran tavallinen
yhtälö on  . Ideaalipisteet
. Ideaalipisteet  ovat kuviteltuja
"äärettömän kaukana sijaitsevien
samansuuntaisten suorien leikkauksia", toimivat laskennassa aivan
kuten muutkin pisteet ja sijaitseva ideaalisuoralla
ovat kuviteltuja
"äärettömän kaukana sijaitsevien
samansuuntaisten suorien leikkauksia", toimivat laskennassa aivan
kuten muutkin pisteet ja sijaitseva ideaalisuoralla  (tai projektiivisessa
avaruudessa
ideaalitasolla).
(tai projektiivisessa
avaruudessa
ideaalitasolla).
1.3.2Duaalisuus ja lauseiden dualisointi
Projektiivisen tason pisteet ja suorat ovat duaalisia eli
niitä koskevissa lauseissa sanan "suora" ja
"piste" (:ssa "taso" ja
"piste") voi vaihtaa keskenään (eli lause voidaan
dualisoida):
-
suora kahdesta pisteestä:
 /
(leikkaus-)piste kahdesta suorasta:
/
(leikkaus-)piste kahdesta suorasta:  .
.
-
piste on suoralla / suora on pisteellä:

-
pisteet samalla suoralla:
 / suorat
yhdensuuntaisia:
/ suorat
yhdensuuntaisia: 
1.4Kuvaukset (transformaatiot)
1.4.1Lineaarikuvaus
Lineaarikuvaus tai tuttavallisesti matriisikertolasku  (ilman homogeenisia koordinaatteja), on
määritelty kahdella ehdolla:
(ilman homogeenisia koordinaatteja), on
määritelty kahdella ehdolla:
Lineaarikuvauksen ydin (kernel)
on  :n ratkaisujoukko.
:n ratkaisujoukko.
Yleisiä lineaarikuvauksia:
-
Skaalaus:
 tai
symmetrisessä (uniform) tapauksessa
tai
symmetrisessä (uniform) tapauksessa 
-
Kierto (rotaatio): rotaatiomatriisilla
 ortogonaalisella
matriisilla on aina
ortogonaalisella
matriisilla on aina  (
( oikeakätinen,
oikeakätinen,
 vasenkätinen) ja yksi ominaisarvo
vasenkätinen) ja yksi ominaisarvo  . Kyseistä ominaisarvoa vastaava
ominaisvektori on rotaatioakseli (koska
. Kyseistä ominaisarvoa vastaava
ominaisvektori on rotaatioakseli (koska  :n
ominaisvektori = vektori, jonka suunta ei muutu :llä
kerrottaessa). Toisaalta on:
:n
ominaisvektori = vektori, jonka suunta ei muutu :llä
kerrottaessa). Toisaalta on:
-
akseli + kulma:
 , missä
, missä  , kun
, kun 
-
kolme akselia:

-
akseli + kulma:
1.4.2Affiniteetti (affinikuvaus)
Affiniteetti on kahden tason () tai
avaruuden () välinen kuvaus  .
Tasot/avaruudet, jotka saadaan affiniteetilla toisistaan ovat
affinisia.
.
Tasot/avaruudet, jotka saadaan affiniteetilla toisistaan ovat
affinisia.
Suunnikkaan pinta-ala tai yhdensuuntaissärmiön tilavuus kertoutuvat affinikuvauksessa  :lla.
:lla.
Projektiivisessa avaruudessa/tasossa affiniteetin voi kuvata matriisikertolaskulla:
1.5Matriisien sekalaisia sovelluksia
1.5.1Pienimmän neliösumman sovitus (least squares fit)
Jos yritetään sovittaa -kertoiminen
funktio  liian moneen havaintoon
liian moneen havaintoon  (
( kappaletta,
kappaletta,  ), saadaan
sijoittamalla havainnot polynomiin
ylimäärätty
yhtälöryhmä:
), saadaan
sijoittamalla havainnot polynomiin
ylimäärätty
yhtälöryhmä:  , missä =sijoittamalla saadut kertoimet,
, missä =sijoittamalla saadut kertoimet,  ja
ja  funktion havaitut arvot. Pienimmän
neliosumman sovitus: haetaan :lle
neliömatriisi
funktion havaitut arvot. Pienimmän
neliosumman sovitus: haetaan :lle
neliömatriisi  , :lle
pienempi vektori
, :lle
pienempi vektori  ja ratkaistaan
ja ratkaistaan  tavalliseen tapaan.
tavalliseen tapaan.
1.5.2Markovin ketjut
Markovin ketju (Markov Chain) on joukko tiloja, joiden välisten siirtymien todennäköisyys ei riipu toteutuneesta siirtymä-historiasta. Yksi kätevä esitystapa on stokastinen matriisi: neliömatriisi, jossa jokaisen rivin summa on 1. Esim:
Lyhyt mies saa lyhyen pojan todenäköisyydellä 0.75 ja
pitkän todennäköisyydellä 0.25. Pitkä taas saa
lyhyen todennäköisyydellä 0.1 ja pitkän varmuudella
0.9. Lyhyitä ja pitkiä on aluksi saman verran:  . Stokastinen matriisi
. Stokastinen matriisi  . Toisen
sukupolven jakauma on
. Toisen
sukupolven jakauma on 
 ,
kolmannen sukupolven jakauma on
,
kolmannen sukupolven jakauma on  jne.
jne.
Stokastisella matriisilla on aina ominaisarvo 1 ja stabiili tila äärettömän monen siirtymän jälkeen voidaan laskea diagonalisoimalla.
2Differentiaalilaskentaa yleisesti
2.1Differentiaali
Differentiaali on funktion
linearisaation (yhden muuttujan funktion tapauksessa
tangentin, kahden tapauksessa 3D-tason jne.) kasvun määrä
muuttujansa/muuttujiensa muutoksen suhteen. Esim.  .
Jos
.
Jos  , saadaan kaavasta
, saadaan kaavasta  eli
eli  . Siksi voidaan kirjoittaa
. Siksi voidaan kirjoittaa  .
Huom: differentiaalin ei
välttämättä tarvitse olla pieni, koska kyse on
linearisaation kasvusta (siis esim.
.
Huom: differentiaalin ei
välttämättä tarvitse olla pieni, koska kyse on
linearisaation kasvusta (siis esim.  eikä
eikä  )!
)!
Kahden muuttujan tapauksessa differentiaali on määritelty
osittaisderivaattojen avulla seuraavasti:  eli
eli
 ja samalla tavalla useammille muuttujille.
ja samalla tavalla useammille muuttujille.
Differentiointi (vs. derivointi) tarkoittaa
differentiaalin (siis esim. ) laskemista ja
siinä käytetään derivointia (tai
osittaisderivointia) ja jos halutaan arvo, eikä kaavaa, :n muutos  (
( ).
Esim. jos
).
Esim. jos  , niin
, niin

2.2Jacobian-matriisi
Jacobian-matriisi on usean muuttujan vektoriarvoisen funktion
derivaatta eli käytännössä matriisi, joka
sisältää funktion tulosvektorin  jokaisen elementin (
jokaisen elementin ( kpl.) derivaatat jokaisen
sisääntulevan vektorin elementin ( kpl.) suhteen:
kpl.) derivaatat jokaisen
sisääntulevan vektorin elementin ( kpl.) suhteen:

Jacobian-matriisille mm. pätee ketjusääntö  .
.
Huom! älä sekoita Jacobian-matriisia yhtälöryhmien
implisiittisessä derivoinnissa käytettävään
Jacobian-determinanttiin  .
.
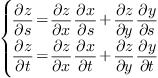
2.3Monen muuttujan ketjusääntö
Yhden muuttujan ketjusäännön  yleistettyjä versioita:
yleistettyjä versioita:
-
Jos
 ja ja riippuvat molemmat muuttujasta
ja ja riippuvat molemmat muuttujasta  (eli
(eli  ), on:
), on:

-
Jos
ja  riippuuvat
kahdesta muuttujasta
riippuuvat
kahdesta muuttujasta  (eli
(eli  ),
on:
),
on:
3ODEt - ”tavalliset” differentiaaliyhtälöt
Tiivistelmä: lineaariselle, 1. asteen ODElle on ratkaisukaava, samoin kuin (vakiokertoimiselle) ryhmälle niitä. Muissa tapauksissa Laplace-muunnos on usein kätevin tapa ellei likiarvoratkaisu riitä.
Tässä kappaleessa käytetään vapaana muuttujana
välillä :ää ja
välillä :ta – älä
hämäänny. Kirjain on yleinen
käytäntö, koska differentiaaliyhtälöitä
käytetään usein ajasta riippuvien ilmiöiden
mallintamiseen.
3.1Peruskäsitteitä
-
Tavallinen differentiaaliyhtälö:
 (yhden muuttujan funktio)
(yhden muuttujan funktio)
-
Kertaluku (tässä ):
 , ts. monenettako derivaattaa funktiosta
löytyy
, ts. monenettako derivaattaa funktiosta
löytyy
-
Eksplisiittinen ODE: yhtälö on
muodossa
 (eikä esim.
(eikä esim.
 )
)
-
Osittaisdifferentiaali:
 on differentiaali yhden muuttujan suhteen (monen
muuttujan funktiossa)
on differentiaali yhden muuttujan suhteen (monen
muuttujan funktiossa)
- Yleinen ratkaisu vs. erityisratkaisu/erikoisratkaisu (eng. particular/special solution)
-
Alkuarvo-ongelma: määritelty :n ja derivaattojen arvot yhdessä pistessä
-
Reuna-arvo-ongelma: määritelty :n ja derivaattojen arvot kahdessa pisteessä
3.2Yksittäisen ODEn tarkka ratkaiseminen
3.2.1Separoituva: integrointi puolittain
ODE on separoituva, jos ja
ovat erotettavissa eri puolille
yhtälöä kohtelemalla differentaalia  :n
:n
 :n osamääränä:
:n osamääränä:

Kun molemmat puolet on integroitu, ratkaistaan .
Toisinaan vakiofunktio  tuotta, esim.
tapauksessa:
tuotta, esim.
tapauksessa:  kun
kun  . (Huom:
separoituva ODE on itse asiassa eksaktin ODE:n erikoistapaus
. (Huom:
separoituva ODE on itse asiassa eksaktin ODE:n erikoistapaus  )
)
3.2.2Tasa-asteinen: muuttujan vaihto
ODE on tasa-asteinen, jos sen voi saattaa muotoon  , jolloin sen voi ratkaista vaihtamalla
, jolloin sen voi ratkaista vaihtamalla  :n
ja
:n
ja  :n seuraavasti:
:n seuraavasti:

Vaihdon jälkeen yhtälö on separoituva. Ratkaistaan saadusta yhtälöstä  ,
sijoitetaan takaisin
,
sijoitetaan takaisin  ja ratkaistaan . Huom. triviaaliratkaisu:
ja ratkaistaan . Huom. triviaaliratkaisu:  , jos
, jos
 .
.
3.2.3Eksakti: osittaisderivointi
ODE on eksakti, jos se on muotoa  eli
eli  eli
eli  ja on
olemassa funktio
ja on
olemassa funktio  , jolle
, jolle  .
.
Jos ja  ovat tiedossa,
eksaktiuden voi tarkistaa kaavalla
ovat tiedossa,
eksaktiuden voi tarkistaa kaavalla  eli
eli  (kyllä, derivaatat "menevät ristiin"
aiemman kanssa) ja ratkaista seuraavasti:
(kyllä, derivaatat "menevät ristiin"
aiemman kanssa) ja ratkaista seuraavasti:

Lopuksi ratkaistaan yhtälöstä
 . Ideana on siis soveltaa peräkkäin
. Ideana on siis soveltaa peräkkäin

3.2.4Eksaktiksi muuttaminen: integroiva tekijä
Jos ODE:n voi muuttaa eksaktiksi kertomalla funktiolla  ,
on
,
on  ODE:n integroiva tekijä.
Sellaisen voi löytää systemaattisesti jos se riippuu vain
joko :stä tai :stä:
ODE:n integroiva tekijä.
Sellaisen voi löytää systemaattisesti jos se riippuu vain
joko :stä tai :stä:

Sekä :stä että :stä
riippuvia tekijöitäkin voi olla, mutta niitä ei
tällä kaavalla löydä.
3.2.51. kertaluvun lineearinen ODE: yleinen ratkaisu
-
Homogeeninen (
 , ts. ei :stä
riippumattomia termejä) separoituu. Yleinen ratkaisu:
, ts. ei :stä
riippumattomia termejä) separoituu. Yleinen ratkaisu:  ja vakiokertoimiselle (
ja vakiokertoimiselle ( ):
):  , missä on
mielivaltainen vakio (integrointivakio). Johto:
, missä on
mielivaltainen vakio (integrointivakio). Johto:

-
Homogeenisen (mutta ei epähomogeenisen) ODEn
erikoisratkaisujen lineaarikombinaatio on myös ratkaisu yleinen ratkaisu on
 . Sanotaan,
että
. Sanotaan,
että  on ratkaisun kanta
kun
on ratkaisun kanta
kun  ovat lineaarisesti riippumattomia.
Funktioiden lineaarinen riippumattomuus
selviää, kun lasketaan Wronskian-determinantti (esimerkin vuoksi kolmella funktiolla):
ovat lineaarisesti riippumattomia.
Funktioiden lineaarinen riippumattomuus
selviää, kun lasketaan Wronskian-determinantti (esimerkin vuoksi kolmella funktiolla):  , joka on 0 joss funktiot ovat lineaarisesti riippuvia.
, joka on 0 joss funktiot ovat lineaarisesti riippuvia.
-
Ei-homogeeniselle (
 ) on aina integroiva
tekijä:
) on aina integroiva
tekijä:  . Jos
. Jos  eli
vakio, on yleinen ratkaisu
eli
vakio, on yleinen ratkaisu  .
.
3.3Yksittäisen yhtälön likiarvoratkaisut
3.3.1Suuntakenttä - erikoisratkaisu graafisesti
Valitaan sopiva ruudukollinen  , ratkaistaan
ODEsta kullekin ruudukon pisteelle
, ratkaistaan
ODEsta kullekin ruudukon pisteelle  ja
piirretään vastaava nuoli tai viiva. Alkuarvo-ongelman
ratkaisun voi hahmotella seuraamalla kenttää
alkuarvopisteestä. Tietokoneella voi käyttää
tämän (huonon) ns. Eulerin menetelmän sijaan vaikkapa 4.
asteen Runge-Kuttaa.
ja
piirretään vastaava nuoli tai viiva. Alkuarvo-ongelman
ratkaisun voi hahmotella seuraamalla kenttää
alkuarvopisteestä. Tietokoneella voi käyttää
tämän (huonon) ns. Eulerin menetelmän sijaan vaikkapa 4.
asteen Runge-Kuttaa.
Isocline (tasa-arvokäyrä) on
jokin :n suhteen vakioarvoinen käyrä
suuntakentällä (esim. ns. nullcline eli
käyrä  ).
).
3.3.2Picardin iteraatio - approksimoiva algebrallinen erikoisratkaisu
Picardin iteraatiolla saadaan tarkentuva
approksimaatio alkuarvo-ongelman  ratkaisulle
ratkaisulle

...eli joka askeleella integroidaan välillä  funktiolle , missä
on korvattu :llä ja
edellisen iteraation tuloksella.
funktiolle , missä
on korvattu :llä ja
edellisen iteraation tuloksella.
Ratkaisun olemassaolon testaus suljetulla välillä eli
Picardin lause: jos on
jatkuva laatikon  sisällä, iteraatio
suppenee yksikäsitteiseen ratkaisuun välillä
sisällä, iteraatio
suppenee yksikäsitteiseen ratkaisuun välillä  .
.
3.42. asteen ODE
Muotoa  oleva ODE ratkeaa muuttujaa vaihtamalla:
oleva ODE ratkeaa muuttujaa vaihtamalla:
 . Korkeamman asteen ODEn voi tällä
tavalla muuttaa ensimmäisen asteen ODE-ryhmäksi jonka voi
sitten ratkaista vaikka Laplace-muunnoksella tai ominaisarvojen avulla.
Esim:
. Korkeamman asteen ODEn voi tällä
tavalla muuttaa ensimmäisen asteen ODE-ryhmäksi jonka voi
sitten ratkaista vaikka Laplace-muunnoksella tai ominaisarvojen avulla.
Esim:

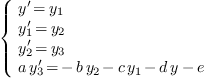
Toisen asteen homogeenisessa tapauksessa:  .
.
3.51. asteen lineearinen homogeeninen ODE-ryhmä
Ryhmä voidaan esittää matriisimuodossa:

Matriisin  sarakkeet ovat ryhmän
erikoisratkaisuja ja kun
sarakkeet ovat ryhmän
erikoisratkaisuja ja kun  on vektorillinen
alkuarvoja,
on vektorillinen
alkuarvoja,  on alkuarvo-ongelman ratkaisu.
Yleinen ratkaisu saadaan myös suoraan ominaisarvoista ja
-vektoreista jos ne ovat erillisiä (ei-moninkertaisia) tai on symmetrinen:
on alkuarvo-ongelman ratkaisu.
Yleinen ratkaisu saadaan myös suoraan ominaisarvoista ja
-vektoreista jos ne ovat erillisiä (ei-moninkertaisia) tai on symmetrinen:

...missä  ovat mielivaltaisia vakioita,
ovat mielivaltaisia vakioita,  matriisin ominaisarvoja ja
matriisin ominaisarvoja ja
 niitä vastaavia ominaisvektoreita.
Kaksinkertaisen ominaisarvon tapauksessa toinen ratkaisu saadaan
kaavalla
niitä vastaavia ominaisvektoreita.
Kaksinkertaisen ominaisarvon tapauksessa toinen ratkaisu saadaan
kaavalla  , missä
, missä  ja
ja
 . (Epäselvää:
onko varmasti ?)
. (Epäselvää:
onko varmasti ?)
Epähomogeenisessa tapauksessa  ja
erikoisratkaisun saa kaavalla
ja
erikoisratkaisun saa kaavalla  . (Epäselvää:
saako yleisen ratkaisun lisäämällä
. (Epäselvää:
saako yleisen ratkaisun lisäämällä  ja mikä silloin on
ja mikä silloin on  ?) Yleisen saa (muun
muassa) ODE:n diagonalisointimenetelmällä:
ratkaistaan ensin uuden yhtälöryhmän,
?) Yleisen saa (muun
muassa) ODE:n diagonalisointimenetelmällä:
ratkaistaan ensin uuden yhtälöryhmän,  ( on :n diagonalisoitu
versio eli ominaisarvomatriisi ja
( on :n diagonalisoitu
versio eli ominaisarvomatriisi ja  , missä
, missä
 on vastaavista ominaispystyvektoreista koottu
matriisi), diagonalisoinnin ansiosta nyt toisistaan riippumattomat,
yhtälöt yksittäisen yhtälön ratkaisukaavalla
on vastaavista ominaispystyvektoreista koottu
matriisi), diagonalisoinnin ansiosta nyt toisistaan riippumattomat,
yhtälöt yksittäisen yhtälön ratkaisukaavalla
 (tai vaikka Laplace-muunnoksella) ja sitten
“epädiagonalisoidaan” tulos:
(tai vaikka Laplace-muunnoksella) ja sitten
“epädiagonalisoidaan” tulos:  .
.
3.5.1Vaihekuvaaja
Kahden muuttujan lineaariselle 1. asteen ODE-ryhmälle voidaan
piirtää kaksiulotteinen vaihekuvaaja,
jossa on parvi erikoisratkaisukäyriä:  .
Kohtia, joissa
.
Kohtia, joissa  sanotaan
tasapainopisteiksi (myös: kriittinen
piste). Homogeenisessä tapauksessa piste on aina
sanotaan
tasapainopisteiksi (myös: kriittinen
piste). Homogeenisessä tapauksessa piste on aina
 . Tasapainopisteiden luokittelu riippuu :n ominaisarvoista:
. Tasapainopisteiden luokittelu riippuu :n ominaisarvoista:
-
Piste on stabiili jos molempien reaalinen osa on
 , muuten epästabiili.
Jos ne reaaliosa on nolla, piste on attraktiivisesti
stabiili (piste on napa tai spiraali ja
lähistön ratkaisut päätyvät siihen) ja muuten
oribitaalisesti stabiili (lähistön
ratkaisut pysyvät pisteen lähellä kun
, muuten epästabiili.
Jos ne reaaliosa on nolla, piste on attraktiivisesti
stabiili (piste on napa tai spiraali ja
lähistön ratkaisut päätyvät siihen) ja muuten
oribitaalisesti stabiili (lähistön
ratkaisut pysyvät pisteen lähellä kun  ).
).
-
Lähiympäristön käytöksestä voidaan sanoa
enemmänkin: reaaliset ja samanmerkkisetnapa
(stabiilisisäänpäin tai
epästabiiliulospäin), reaaliset ja
erimerkkisetsatulapiste (kaksi
käyrää sisään, kaksi ulos, muut
”hipovat”),
 keskus (soikion tai
ympyrän) ja
keskus (soikion tai
ympyrän) ja  spiraali (sisään tai
ulos).
spiraali (sisään tai
ulos).
ODEn linearisointi mahdollistaa
myös epälineaarisen ODEn tasapainopisteiden luokittelun:
yhtälöiden  tasapainopiste
tasapainopiste  luokitellaan matriisin
luokitellaan matriisin  mukaan em.
tavalla paitsi, että 1) ympyräpisteet voivat olla myös
spiraaleja ja 2) tapaus
mukaan em.
tavalla paitsi, että 1) ympyräpisteet voivat olla myös
spiraaleja ja 2) tapaus  voi olla joko spiraali
tai napa.
voi olla joko spiraali
tai napa.
3.6Laplace-muunnos
Laplace-muunnoksessa differentiaaliyhtälö (tai -ryhmä)
muunnetaan ensin aika-alueesta s-tasoon (kirjoitetaan:  ), ratkaistaan sitten
saadusta yhtälöstä F ja tehdään lopuksi
käänteismuunnos (kirj.
), ratkaistaan sitten
saadusta yhtälöstä F ja tehdään lopuksi
käänteismuunnos (kirj.  ). Usein
käänteismuunnosta varten tarvitaan
osamurtokehitelmää. Tulos pätee (tässä
annetulla määritelmällä) vain alueella
). Usein
käänteismuunnosta varten tarvitaan
osamurtokehitelmää. Tulos pätee (tässä
annetulla määritelmällä) vain alueella  ! Alla muutamia tärkeimpiä muunnoksia:
! Alla muutamia tärkeimpiä muunnoksia:
 |
 |
 |
 :n määritelmä :n määritelmä |
 |
|
 |
|
 |
|
 |
|
 |
|
 |
Derivointi |
 |
|
 |
2. derivaatta |
 |
|
 |
Määrätty integraali |
 |
|
 |
Derivointi taajuusalueessa |
 |
|
 |
:n skaalaus |
 |
|
 |
Konvoluutio,  |
 |
|
 |
Konvoluutiolause toiseen suuntaan |
 |
|
1 | Diracin delta”funktio”,  |
 |
|
 |
Heavisiden askelfunktio ( ) ) |
 |
|
 |
Siirto taajuusalueessa |
 |
 |
 |
Aikasiirto, huomaa ! |
|
|
 |
|
 |
|
 |
huom:  |
 |
|
 |
|
 |
|
 |
|
 |
|
 |
Esimerkki: ratkaistaan yksinkertainen epähomogeeninen ODE:

4Sarjat
-
Lukujono suppenee, jos
sillä on raja-arvo äärettömyydessä, muuten
hajaantuu. Vaihtoehtoinen
määritelmä: suppenee, jos on
 ,
missä
,
missä  voidaan valita mielivaltaisen
pieneksi, ja aina löytyy
voidaan valita mielivaltaisen
pieneksi, ja aina löytyy  sen
sisältä.
sen
sisältä.
-
Sarja on äärettömän
lukujonon summa. Se suppenee, jos sen osasumista
muodostettu jono suppenee. Tällöin
 .
.
-
Eikö luku ei kasva äärettömäksi
äärettömällä summauksella vaikka summattava
pienenisikin? Vastaus: ei, koska esim.

- Äärettömät sarjat ovat usein ratkaisuja differentiaaliyhtälöihin, joita ei voi muuten esittää alkeisfunktioilla.
Koska sarja voidaan tulkita jonon osasummasarjan raja-arvoksi
äärettömyydessä, saadaan raja-arvon
laskusäännöistä (kun  ja
ja  ):
):
-

-

-
Jos
 kaikille , niin
kaikille , niin

4.1Suppenemisen testaus
Suppenemista voi testata helpommin kuin laskea summan, ja
positiivis-termisen sarjan suppeneminen on helpompi laskea kuin
vaihtelevatermisen. Jos  :
:
- Integraalitesti
-
 suppenee joss
suppenee joss  suppenee. ( voidaan valita mielivaltaisesti,
koska suppeneminen ei koskaan riipu jonon alusta.)
suppenee. ( voidaan valita mielivaltaisesti,
koska suppeneminen ei koskaan riipu jonon alusta.)
- Osamäärätesti
-
 , eli perättäisten termien
osamäärä
, eli perättäisten termien
osamäärä
- n:s juuri-testi
-
 , eli alkion äärettömäs
juuri äärettömässä
, eli alkion äärettömäs
juuri äärettömässä
Molemmille sarja suppenee, jos  , saattaa
hajaantua, jos
, saattaa
hajaantua, jos  ja hajaantuu varmasti, jos . Luku
ja hajaantuu varmasti, jos . Luku  on olemassa useammin
kuin
on olemassa useammin
kuin  , mutta kun molemmat ovat olemassa, on
, mutta kun molemmat ovat olemassa, on  .
.
Jos taas summassa on sekä positiivisia että negatiivisia
termejä, se suppenee ainakin jos  suppenee (suppenee absoluuttisesti), ja toisinaan
muulloinkin (suppenee ehdollisesti). Erityisesti:
suppenee (suppenee absoluuttisesti), ja toisinaan
muulloinkin (suppenee ehdollisesti). Erityisesti:
 (eli joka toinen termi negatiivinen) suppenee,
jos ja
(eli joka toinen termi negatiivinen) suppenee,
jos ja  (Leibnizin
lause).
(Leibnizin
lause).
4.2Yleisimpiä sarjoja
- Aritmeettinen sarja
-
 (ts.
(ts.  ).
Perättäisten termien erotus on vakio. Hajaantuu aina, mutta
osasumma on
).
Perättäisten termien erotus on vakio. Hajaantuu aina, mutta
osasumma on  .
.
- Geometrinen sarja
-
 . Perättäisten termien
osamäärä on vakio.
. Perättäisten termien
osamäärä on vakio.
Suppenee arvoon
 , kun
, kun  .
Osasumma
.
Osasumma  .
.
- p-sarja
-
 . Suppenee, kun
. Suppenee, kun  ja
hajaantuu muuten. Huomaa erityisesti, että
ja
hajaantuu muuten. Huomaa erityisesti, että  eli harmoninen sarja (
eli harmoninen sarja ( ),
hajaantuu (vaikkakin hitaasti). Summan yleistä kaavaa ei
ole, mutta
),
hajaantuu (vaikkakin hitaasti). Summan yleistä kaavaa ei
ole, mutta  .
.
4.3Potenssisarjat
Potenssisarja on muotoa  , missä on sarjan suppenemiskeskus.
, missä on sarjan suppenemiskeskus.
Potenssisarja suppenee aina ja vain suppenemiskeskuksensa
ympäristössä säteellä  (
( ), missä
), missä  (kts.
”osamäärätesti” ylempää).
Päätepisteet voivat joko kuulua tai olla kuulumatta :n määräämään
suppenemisintervalliin.
(kts.
”osamäärätesti” ylempää).
Päätepisteet voivat joko kuulua tai olla kuulumatta :n määräämään
suppenemisintervalliin.
Yhteenlaskettujen potenssisarjojen suppenemissäde on  . Sama pätee myös keskenään kerrotuille
potenssisarjoille (Cauchyn tulo):
. Sama pätee myös keskenään kerrotuille
potenssisarjoille (Cauchyn tulo):

Huom: Taylorin sarja on potenssisarja,
jolle  .
.
Erityisen tärkeä (geometrinen/Taylorin/McLaurinin) potenssisarja on:

4.4Fourier-sarja
t
-
Määritelmä:
 -jaksoisen
funktion Fourier-sarja (alueella
-jaksoisen
funktion Fourier-sarja (alueella  ) on:
) on:

...tai kompleksimuodossa lyhyemmin:

-
Jos on parillinen funktio
(eli
 ),
),  aina ja sarja
supistuu “fourier-kosinisarjaksi”:
aina ja sarja
supistuu “fourier-kosinisarjaksi”:

-
Jos on pariton funktio
(eli
 ),
),  aina ja sarja
supistuu “fourier-sinisarjaksi”:
aina ja sarja
supistuu “fourier-sinisarjaksi”:
 . (Huom: parittomuuden seuraus:
. (Huom: parittomuuden seuraus:  )
)
-
Kertoimien skaalaaminen vakiolla vasta :n
skaalaamista
5Monen muuttujan analyysi
5.1Avaruuspinta
Kahdella muuttujalla parametrisoitu avaruuspinta:

Normaali:

Pinta-ala lasketaan seuraavasti:

5.2Raja-arvo
-
Monen muuttujan funktion raja-arvo määritellään
-ulotteisen, rajatta pienenevän pallon
avulla
-
Yleinen raja-arvo on olemassa vain, jos se on sama
lähestymissuunnasta riippumatta. Esim. funktiolle
 ,
,  -akselia
ja -akselia pitkin
lähesteyttäessä, mutta suoraa
-akselia
ja -akselia pitkin
lähesteyttäessä, mutta suoraa
 pitkin lähestyttäessä,
sillä
pitkin lähestyttäessä,
sillä  , mutta
, mutta  .
.
-
Raja-arvo voi myös olla olemassa kaikkia suoria
 pitkinä lähestyttäessä, mutta ei
muita käyriä pitkin. Esim.
pitkinä lähestyttäessä, mutta ei
muita käyriä pitkin. Esim.  , mutta
, mutta
 .
.
- Funktio on jatkuva tietyssä pisteessä joss raja-arvo on siinä sama kuin funktion arvo. Funktiosta voi siksi tehdä jatkuvan määrittelemällä arvo epäjatkuvassa pisteessä sopivasti, joss raja-arvo on olemassa.
5.3Monen muttujan funktion differentiaalit
5.3.1Osittaisderivaatta
-
Osittaisderivaatta on derivaatta jonkin muuttujan suhteen ja sitä
merkitään "doo":lla, esim.
 .
.
-
Korkeamman kertaluvun osittaisderivaatat voivat olla
myös ns. sekaderivaattoja, esim.
 on
on  derivoituna ensin :n ja
sitten :n suhteen.
derivoituna ensin :n ja
sitten :n suhteen.
- Jos itse funktio ja sen alemman kertaluvun osittaisderivaatat ovat jatkuvia tietyssä pisteessä, eri järjestyksessä otetut sekaderivaatat ovat samoja. Epäjatkuvassa tapauksessa näin ei ole.
5.3.2Gradientti ja suunnattu derivaatta
N:n muuttujan funktion gradientti on -ulotteinen vektori, joka on koottu funktion
osittaisderivaatioista. Gradienttia merkitään nabla- eli
del-symbolilla:

-
Funktio kasvaa aina nopeiten gradienttinsa suuntaan. Derivaatta k.o.
suuntaan on
 .
.
- Gradienttivektori on aina tasokäyrän normaali (vrt. kukkula, jonka huipulta valuu vettä)
-
Funktion derivaatta (kasvunopeus) mielivaltaiseen suuntaan
 on
on 
-
Liikkuvan tarkkailijan kokema kasvunopeus (nopeus
 ei välttämättä yksikkövektori!) on samoin
ei välttämättä yksikkövektori!) on samoin

5.4Napakoordinaatisto
Kahden muuttujan funktioiden tasa-arvokäyriä voi toisinaan esittää kätevästi napakoordinaateilla. Muunnokset karteesisten ja napakoordinaattien välillä sujuvat seuraavilla kaavoilla:

5.5Monen muuttujan ääriarvotehtävät
5.5.1Ääriarvopisteiden luokittelu (Hessian)
Ääriarvopisteitä voivat myös monen muuttujan
tapauksessa olla derivaatan (gradientin) nollakohdat ( )
tai reunapisteet. Yhden muuttujan tapauksessa kriittisen
pisteen tyypin voi määritellä toisesta
derivaatasta:
)
tai reunapisteet. Yhden muuttujan tapauksessa kriittisen
pisteen tyypin voi määritellä toisesta
derivaatasta:
-
 maksimi
maksimi
-
 minimi
minimi
-
 ei tietoa (jos vaihtaa merkkiä :n kohdallasatulapiste)
ei tietoa (jos vaihtaa merkkiä :n kohdallasatulapiste)
Monen muuttujan tapauksessa luokittelu hoituu kyseisessä
pisteessä lasketun Hessian-matriisin
ominaisarvojen ( ) avulla:
) avulla:

-
kaikki
 maksimi
maksimi
-
kaikki
 minimi
minimi
-
osa
 positiivisia, osa negatiivisia ei tietoa
positiivisia, osa negatiivisia ei tietoa
5.5.2Rajoitetut ääriarvotehtävät (Lagrange-kertoimet)
Jos ääriarvotehtävässä vastauksiksi kelpaa vain
osa kriittisistä pisteistä, voidaan tehtävä
ratkaista muotoilemalla rajoitusfunktio  ja
minimoimalla/maksimoimalla alkuperäisen sijaan Lagrangen
funktio...
ja
minimoimalla/maksimoimalla alkuperäisen sijaan Lagrangen
funktio...

...missä  on nimeltään
Lagrangen kerroin. Jos rajoituksia on
enemmän, myös kertoimia ja rajoitusfunktioita voidaan ottaa
mukaan enemmän. Esim:
on nimeltään
Lagrangen kerroin. Jos rajoituksia on
enemmän, myös kertoimia ja rajoitusfunktioita voidaan ottaa
mukaan enemmän. Esim:

6Skalaari- ja vektorikentät
-
skalaarikenttä on
 ja vektorikenttä on
ja vektorikenttä on  .
.
-
Skalaarikenttä
 on vektorikentän
on vektorikentän  potentiaali, joss
potentiaali, joss  kaikissa pisteissä. (On ilmeisesti olemassa
myös kaikille kentille määritelty
vektoripotentiaali
kaikissa pisteissä. (On ilmeisesti olemassa
myös kaikille kentille määritelty
vektoripotentiaali  ,
jolle
,
jolle  . Käyttötavasta ei
käsitystä.)
. Käyttötavasta ei
käsitystä.)
-
Vektorikenttä (tai esim. voima) on konservatiivinen, jos sillä on potentiaalikenttä (kaikilla vektorikentillä ei ole). Integraalin tapaan potentiaali ei ole yksikäsitteinen, vaan siihen voi lisätä mielivaltaisen vakion. Konservatiiviselle vektorikentälle
 pätee:
pätee:

Tai toisaalta:
 . Jos kenttä on
konservatiivinen, potentiaalin voi laskea seuraavasti:
. Jos kenttä on
konservatiivinen, potentiaalin voi laskea seuraavasti:

(lopuksi ilmeisesti voi merkitä
 ja
lisätä integrointivakion C)
ja
lisätä integrointivakion C)
-
Vuo (Flux) on
vektorikentän vektoreiden ja käyrän (2D) tai pinnan
(3D) normaalin pistetulon summa (ts. paljonko vektoreita
“virtaa” käyrän/pinnan läpi sen
suuntaisesti).
 ja
ja  .
.
6.1Viivaintegraali
Viivaintegraali on viivan differentiaalisten
tangenttivektorien ( ) ja kentän tulon summa.
Skalaarikentän tapauksessa tulo
) ja kentän tulon summa.
Skalaarikentän tapauksessa tulo  ja
vektorikentän tapauksessa
ja
vektorikentän tapauksessa  .
.
Viivaintegraali lasketaan parametrisoimalla  :n
-komponentin, derivoimalla ne :n
suhteen, ottamalla tulo (piste- tai skalaari) ja integroimalla. Esim:
:n
-komponentin, derivoimalla ne :n
suhteen, ottamalla tulo (piste- tai skalaari) ja integroimalla. Esim:

Joskus vektorikentän yli viivaintegraalia merkitään  , mikä tarkoittaa samaa kuin
, mikä tarkoittaa samaa kuin  ja se lasketaan samalla tavalla parametrisoidun :n
ja
ja se lasketaan samalla tavalla parametrisoidun :n
ja  :n pistetulona kuin yllä.
:n pistetulona kuin yllä.
Tyypillinen esimerkki viivaintegraalista vektorinkentän yli on
fysikaalinen työ, jonka voima tekee kuljettaessaan pistemäistä kappaletta
käyrää pitkin.
6.1.1Greenin lause (suljetun käyrän viivaintegraali)
Tasolla suljetun käyrän viivaintegraalin voi joskus laskea helpommin seuraavasti:

...missä on käyrän sisään jäävä alue ja käydään läpi
vastapäivään. Oikea puoli on siis pinta-integraali, jossa
lasketaan ensin vaakasuuntainen integraali ja sitten pystysuuntainen
(tai päinvastoin). Jos on reikäinen,
lasketaan reikien seintän mukaan, mutta
myötäpäivään.
6.1.2Stokesin lause (moniulotteiset pinnat)
Stokesin lause on Greenin lauseen laajennus moniulotteisille pinnoille:

6.2”Vektoriderivaatat” - grad, div, curl
Kentille voidaan määritellä kolme eri “derivaattaa”, joista jokainen on eri kerto-operaattorin ja nabla-operaattorin “formaali tulo”:
-
Gradientti on vektorikenttä, joka osoittaa skalaarikentän nopeimman kasvun suunnan (kasvunopeus on k.o. vektorin pituus):

-
Divergenssi on skalaarikenttä, joka kertoo kuinka paljon toinen vektorikenttä “etääntyy pisteestä
”
eli tarkemmin sanottuna vuo äärettömän pienen
-keskisen pallon (tasossa kiekon)
sisältä:

Divergenssin voi siis myös tulkita lähteen (esim. pistevarausten tapauksessa Diracin delta-funktio tai jatkvassa tapauksessa varaustiheys) voimakkuudeksi yksikkötilavuutta kohti.
-
Curl (karmeasti suomennettuna roottori) on vektorikenttä, joka kertoo kuinka paljon kenttä “pyörii pisteen
ympäri” eli tarkemmin sanottuna kiekon
reunan muodostavien äärettömän monen
tangenttivektorin () ja vektorikentän
vektorien pistetulo kerrottuna kiekon ()
yksikkönormaalilla ( ):
):

Näille pätee kaikenlaisia yhtälöitä, mm.:
-
 eli
eli 
-
 eli
eli 
-
ns. laplacian:
 tai
vektorikentälle:
tai
vektorikentälle:  . Skalaarikenttä on
harmoninen jollain alueella, joss
siellä pätee laplace-yhtälö
. Skalaarikenttä on
harmoninen jollain alueella, joss
siellä pätee laplace-yhtälö
 .
.
6.3Divergenssilause (aka. Gaussin laki)
Vuo jonkin alueen D pinnan S läpi on yhtä suuri kuin kaikkien sen pisteiden divergenssien summa (=tilavuusintegraali):

Erityisesti: jos suljetun pinnan sisällä ei ole yhtään lähdettä (positiivista tai negatiivista, source tai sink), on kokonaisvuo sen läpi 0 kentästä riippumatta (mikä tulee sisään, menee myös ulos). Huomaa, että esim. pistevarausten tapauksessa lähteet ovat pistemäisiä Diracin delta-funktioita, joiden integraalilla on arvo vaikka niitä ympäröivä kiekko pienennettäisiin kuinka pieneksi tahansa.
Variaatioita (”curl-lause” ja ”gradienttilause”??), joiden tulos on vektori:

7Kompleksiluvut
-
Imaginääriyksikkö
 ja
ja 
-
moduli =
 ,
argumentti =vaihekulma=
,
argumentti =vaihekulma=

-
polaariesitys:
 (Eulerin kaava, muistisääntö:
(Eulerin kaava, muistisääntö:
 )
)
 ja
ja 
-
pääarvo = =
 :n se arvo, joka on välillä
:n se arvo, joka on välillä 
-
liittoluku eli konjugaatti on
 . Sille pätee:
. Sille pätee:
 ,
,  ,
,  ,
, 
-
kertolasku:
 =
=

-
jakolasku:
 =
=
 . Huom. erityisesti:
. Huom. erityisesti: 
-
käänteisluku:
 tai
tai 
-
potenssiin korotus (
 ) (De Moivren
kaava):
) (De Moivren
kaava): 
-

-
:s juuri:

Arvoja on siis
kappaletta ja ne sijaitsevat
tasaisin välein  -säteisellä
ympyrällä.
-säteisellä
ympyrällä.
-
kolmioepäyhtälö:

7.1Kompleksiset funktiot
-
Merkitään
 , missä
, missä 
-
Jos
 on differentioituva tietyssä
pisteessä
on differentioituva tietyssä
pisteessä  .
Lisäksi
.
Lisäksi  (Cauchy-Riemann-osittaisderivaattayhtälö).
(Cauchy-Riemann-osittaisderivaattayhtälö).
-
Jos
 ja
on jatkuva on
differentioituva.
ja
on jatkuva on
differentioituva.
-
on analyyttinen, jos se
on differentioituva :n naapurustossa (-säteisen kiekon sisällä kaikissa
pisteissä). Lisäksi: on
differentioituva äärettömässä jos
 on analyyttinen origossa.
on analyyttinen origossa.
-
Jos on analyyttinen
 ja ovat harmonisia
(ks. kahden muuttujan funktiot).
ja ovat harmonisia
(ks. kahden muuttujan funktiot).
-

-
Ns. conformal mapping
 määräytyy yksiselitteisesti kolmella pisteellä:
määräytyy yksiselitteisesti kolmella pisteellä:
 (
( :n
sisältävät osamäärät korvataan :llä!). K.o. kuvaus muuttaa suoria ympyröiksi
ja päinvastoin.
:n
sisältävät osamäärät korvataan :llä!). K.o. kuvaus muuttaa suoria ympyröiksi
ja päinvastoin.
-
Suljetun polun viivaintegraalin laskemiseen on kasa erilaisia sääntöjä, joista residuaalimenetelmä vaikuttaa erityisen hyödylliseltä. Kun polku ei leikkaa itseään ja on positiivisesti orientoitu ja
on polun sisällä muuten
analyyttinen, mutta :ssa pisteessä on
singulaarinen napa (eng. pole),
pätee Cauchyn residuaalilause:

Jos polku on negatiivisesti orientoitu, lasketaan residuaalit negatiivisina. Huom: jos singulariteettejä ei ole, on integraali
 .
.
8Abstrakti algebra
= algebrallisia rakenteita (eli alkioiden ja niihin kohdistuvien operaatioiden yhdistelmiä) aksiomaattisesti (eli pieneen määrään perusoletuksia nojaavasti) käsittelevä oppi.
8.1Ryhmät (groups) ja monoidit (monoids)
Joukon  ja siihen vaikuttavan jonkin operaation
ja siihen vaikuttavan jonkin operaation
 yhdistelmä,
yhdistelmä,  , on
nimeltään:
, on
nimeltään:
-
puoliryhmä (semigroup), jos on assosiatiivinen eli

-
monoidi, jos lisäksi on olemassa neutraalialkio
 , jolle
, jolle

-
jos on
 (additiivinen ryhmä), niin
(additiivinen ryhmä), niin  merkitään
merkitään
-
jos on
 (multiplikatiivinen ryhmä), niin
merk. 1. Merkitään myös
(multiplikatiivinen ryhmä), niin
merk. 1. Merkitään myös  .
.
-
jos
-
ryhmä (group), jos lisäksi kaikille alkioille on käänteisalkio:

-
abelin ryhmä, jos se on lisäksi
kommutatiivinen eli
 kaikille . Huom: myös puoliryhmä ja
monoidi voivat olla kommutatiivisia.
kaikille . Huom: myös puoliryhmä ja
monoidi voivat olla kommutatiivisia.

 , niin
voidaan merkitä myös
, niin
voidaan merkitä myös  ja
ja 
Jos on äärellinen niin välttämättä
”pyörähtää ympäri” (kongruenssin
tapaan) koska kaikille  . Esim.
ryhmässä ({0,2,4}, +) on
. Esim.
ryhmässä ({0,2,4}, +) on  mutta
mutta  .
.
Lisää määritelmiä ja lauseita:
-
alkion potenssi
 yhteensä kertaa.
yhteensä kertaa.
-
jos on , niin
potenssia merkitään

-
jos
-
ryhmän kertaluku (order)
 on sen alkioiden määrä
on sen alkioiden määrä
-
aliryhmä on :n
jonkin ei-tyhjän osajoukon ja ryhmän
operaattorin yhdistelmä, jos myös kyseinen osajoukko on
ryhmä kyseisellä operaattorilla (joss
 on ko. alijoukko ja
on ko. alijoukko ja  ).
).
-
triviaali aliryhmä on nimitys aliryhmille
 ja
ja  )
)
-
suora tulo
 ,
on uusi ryhmä (jolla on uusi operaattori
,
on uusi ryhmä (jolla on uusi operaattori  )
siten, että:
)
siten, että: 
-
homomorfismi on funktio
 ryhmien
ryhmien  välillä, jos kaikille
välillä, jos kaikille  pätee
pätee  .
.
-
isomorfismi on homomorfismi, joka on
lisäksi bijektio (eli kääntäen
yksikäsitteinen, ts. on olemassa myös isomorfismi
 ). (esim.
). (esim.  on isomorfismi
on isomorfismi  , koska
, koska  – ts.
logaritmilla voidaan muuttaa
– ts.
logaritmilla voidaan muuttaa  :n kertolasku
:n kertolasku  :n yhteenlaskuksi (kuten oli tapana ennen laskimia).
:n yhteenlaskuksi (kuten oli tapana ennen laskimia).
- ryhmiä sanotaan isomorfisiksi, jos niiden välillä olemassa isomorfismi ja ne voidaan tällöin samaistaa (rakenteellisesti).
-
syklinen ryhmä on ryhmä, jonka kaikki alkiot ovat jonkin sen alkion potensseja. Kyseinen alkio virittää ryhmän (generates the group) ja merkitään
 .
Viritetyn (usein ali-)ryhmän suuruus eli alkion
kertaluku on
.
Viritetyn (usein ali-)ryhmän suuruus eli alkion
kertaluku on  .
.
-
jos on ääretön, syklinen
ryhmä on isomorfinen
 :n kanssa
:n kanssa
-
jos taas äärellinen ja
 , niin
, niin
 :n kanssa.
:n kanssa.
-
virittävälle alkiolle on

- Syklisen ryhmän kaikki aliryhmät ovat syklisiä.
- Kleinin ryhmä on pienin ei-syklinen ryhmä (yksikäsitteinen, kertaluku 4, en piirrä tähän).
-
Jokainen ryhmä, jonka on alkuluku, on
syklinen. Syy:
-
jos
-
Lagrangen lause: jos
 on
ryhmän aliryhmä, niin
on
ryhmän aliryhmä, niin  jakaa :n (eli
jakaa :n (eli  )
)
Esimerkki: syklinen ryhmä  ,
virittäjänä , on isomorfinen
,
virittäjänä , on isomorfinen  :n kanssa kun määritellään:
:n kanssa kun määritellään:  :
:


 ja
aliryhmät
ja
aliryhmät  :
: 
8.2Renkaat (ring) ja kunnat (field)
Joukon ja sen kahden operaation  ja yhdistelmä,
ja yhdistelmä,  , on
algebrallinen rengas, jos:
, on
algebrallinen rengas, jos:
 on kommutatiivinen ryhmä ja
on kommutatiivinen ryhmä ja
 on puoliryhmä ja
on puoliryhmä ja


Lisäksi:
-
Renkaan ykkösalkio (ei aina olemassa)
merkitään 1 ja määritellään

-
Alkio
 on aito nollatekijä jos on olemassa
on aito nollatekijä jos on olemassa  , jolle
, jolle  tai
tai  .
.
-
Yksikkö (unit) on alkio
,
jolla on jokin käänteisalkio  (missä
(missä  ).
).
Huom: “yksikkö”
“ykkösalkio” (:n
neutraalialkio, unity)
-
Kommutatiivinen rengas on rengas, jolle
 (ei esim. matriisirenkaissa).
(ei esim. matriisirenkaissa).
-
Kunta (field ) on kommutatiivinen
rengas jonka kaikki ovat yksiköitä.
(Esim.
 on kunta, mutta
ei, koska esim.
on kunta, mutta
ei, koska esim.  eli 4 ei ole yksikkö eli
sillä ei ole kokonaisluku-käänteisalkiota.)
eli 4 ei ole yksikkö eli
sillä ei ole kokonaisluku-käänteisalkiota.)
-
Kokonaisalue (integral domain) on
kommutatiivinen rengas, jolla ei ole nollatekijöitä
(ekvivalentti ehto:
 ).
).
- Kaikki kunnat ovat kokonaisalueita ja kaikki äärelliset kokonaisalueet ovat kuntia.
-
Jos alkiolla on käänteisalkio, se ei voi olla
nollatekijä kunnassa ei ole lainkaan
aitoja nollatekijöitä.
-
 on kommutatiivinen, ykkösalkiolla
varustettu rengas ja sen alkiolla on
käänteisluokka joss
on kommutatiivinen, ykkösalkiolla
varustettu rengas ja sen alkiolla on
käänteisluokka joss  . Joss on alkuluku, on
. Joss on alkuluku, on  (myös)
kunta (eli kaikilla alkioilla, ts. kongruenssiluokilla, on
käänteisalkio).
(myös)
kunta (eli kaikilla alkioilla, ts. kongruenssiluokilla, on
käänteisalkio).
-
Kaikkien äärellisten kuntien koko on muotoa
 ,
missä on alkuluku ja
,
missä on alkuluku ja  .
.
- Alirangas on rengas, jonka alkioina on jonkin toisen renkaan alkioiden osajoukko.
-
Ideaali alirengas on
:n alirengas, jolle 1) kaikkien sen alkioiden
erotuksetkin kuuluvat :hin (ts.
 kaikille
kaikille  ) ja 2) myös
kaikille
) ja 2) myös
kaikille  pätee
pätee  .
.
-
Kaikki
:n alirenkaat ovat ideaaleja ja niiden
alkiot ovat muotoa  .
.
Tästä johtuu:
 .
.
-
Renkaan karasteristika
 on on pienin
on on pienin  , jolle
, jolle  .
Jos yhtään tällaista lukua ei ole olemassa,
.
Jos yhtään tällaista lukua ei ole olemassa,  .
.
-
Jos kyseessä on kunta ja
 , on alkuluku. Kuntien , ja
, on alkuluku. Kuntien , ja  karasterika on , mutta on olemassa äärettömiä
kuntia, joiden
karasterika on , mutta on olemassa äärettömiä
kuntia, joiden  (esim.
(esim.  ).
).
-
Rengashomomorfismi on funktio
 (missä
(missä  ja
ja  ovat renkaita), jos kaikille
ovat renkaita), jos kaikille  on
on
 ja
ja  . Jos on lisäksi bijektio (kääntäen
yksikäsitteinen kuvaus), se on isomorfismi.
Renkaat ovat keskenään isomorfisia jos niiden
välillä on olemassa isomorfismi.
. Jos on lisäksi bijektio (kääntäen
yksikäsitteinen kuvaus), se on isomorfismi.
Renkaat ovat keskenään isomorfisia jos niiden
välillä on olemassa isomorfismi.
-
“Matriisirengas renkaan yli” eli
 on -neliömatriiseista koottu rengas, jonka
matriisialkiot ovat :n alkioita.
Matriisikertolaskun epäkommutatiivisuudesta johtuen
on -neliömatriiseista koottu rengas, jonka
matriisialkiot ovat :n alkioita.
Matriisikertolaskun epäkommutatiivisuudesta johtuen  on harvoin kommutatiivinen vaikka
olisikin.
on harvoin kommutatiivinen vaikka
olisikin.
8.3Polynomirenkaat
Jos on rengas (vaika -kunta,
tai äärellinen -rengas tai vaikka
matriisirengas):
-
”Muuttujan -polynomi”
on muotoa
 , missä
, missä  .
.
-
Johtokerroin on polynomin korkeinta astetta
oleva termin kerroin
 .
.
-
Vakiotermi on
 (nollapolynomi, jos
(nollapolynomi, jos  ).
).
-
Merkintätapa:
 = muuttujan kaikkien -polynomien
(ääretön) joukko.
= muuttujan kaikkien -polynomien
(ääretön) joukko.
-
Äärettömällekin joukolle :n
polynomeja on yleisessä tapauksessa useita esitystapoja. Esim.
jos
 niin
niin  , koska
, koska  .
.
-
Jos polynomin kertoimet ovat
 ja
ja  :n kertoimet
:n kertoimet  niin
niin
 :n tulon termien kertoimet ovat
:n tulon termien kertoimet ovat  . Huom: jos -renkaassa
on aitoja nollatekijöitä, tulon aste saattaa olla pienempi
kuin :n ja
. Huom: jos -renkaassa
on aitoja nollatekijöitä, tulon aste saattaa olla pienempi
kuin :n ja  :n asteiden
summa.
:n asteiden
summa.
-
”Polynomirengas yli ”:n
on rengas
 .
.
-
Juuri on :n arvo, jolla polynomin arvoksi tulee
nolla-alkio. Huom: yleisessä tapauksessa (kun
-rengas ei ole kokonaisalue) :n
polynomeilla voi siis olla niiden astetta enemmän juuria.
-
 on redusoituva eli
jaollinen, jos sen aste on
on redusoituva eli
jaollinen, jos sen aste on  ja
ja  joillekin
joillekin  , joiden aste on
, joiden aste on  .
Jaoton polynomi on redusoimaton.
Huom: redusoituvuus riippuu :stä:
esim.
.
Jaoton polynomi on redusoimaton.
Huom: redusoituvuus riippuu :stä:
esim.  on jaoton, mutta
on jaoton, mutta  jaollinen:
jaollinen:  .
.
-
Jos on kunta ja polynomi on astetta 2 tai 3,
se on redusoituva/jaollinen joss sillä on juuri :ssä.
-
Polynomien suhteellinen redusoimattomuus:
 vakio (eli astetta nolla).
vakio (eli astetta nolla).
-
Normeerattu polynomitulo on
tekijöihin jaetun polynomin yksikäsitteinen esitysmuoto,
jossa koko lauseke on kerrottu vakiolla ja kaikkien tekijöiden
(redusoimattomia, ts. jaottomia polynomeja) johtokerroin on :

-
Eri polynomirakenteiden määrä voidaan rajata (tavallisesti äärettömästä
:stä)
äärelliseksi kongruenssilla: valitaan jokin polynomi  ja määrätään, että
kaikkien renkaan operaatioiden tuloksesta otetaan lopuksi
jakojäännös :llä.
Merkitään:
ja määrätään, että
kaikkien renkaan operaatioiden tuloksesta otetaan lopuksi
jakojäännös :llä.
Merkitään:  . Jos
on redusoituva, tulos on rengas ja jos taas redusoimaton niin kunta.
Esim. polynomikunnan
. Jos
on redusoituva, tulos on rengas ja jos taas redusoimaton niin kunta.
Esim. polynomikunnan  operaatiot ovat:
operaatiot ovat:
 ja
ja 
Jos
on ääretön, on tietysti
myös ääretön vaikka eri
polynomimuotoja onkin rajallisesti. Esim.  on
isomorfinen :n kanssa.
on
isomorfinen :n kanssa.
-
Galois-kunta
 polynomikunta
polynomikunta
 , missä on,
kertalkua oleva redusoimaton, normeerattu
polynomi. :n löytäminen ei ole
yleensä helppoa, mutta siihen on olemassa algoritmeja.
Galois-kunnan karasteristika
, missä on,
kertalkua oleva redusoimaton, normeerattu
polynomi. :n löytäminen ei ole
yleensä helppoa, mutta siihen on olemassa algoritmeja.
Galois-kunnan karasteristika  .
.
-
 :n fundamentaalikunta on sen alikunta
:n fundamentaalikunta on sen alikunta  . Erityistapaus:
. Erityistapaus:  eli yksinkertaisen (siis
”ei-moninkertaisen”) alkuluvun Galois-kunta on oma
fundamentaalikuntansa.
eli yksinkertaisen (siis
”ei-moninkertaisen”) alkuluvun Galois-kunta on oma
fundamentaalikuntansa.
-
Jokainen
 kokoinen (eli “kertalukua
kokoinen (eli “kertalukua  oleva“) kunta on isomorfinen :n
kanssa.
oleva“) kunta on isomorfinen :n
kanssa.
8.4Kooditeoria
Boolen algebran (symbolien  jonoista sekä
operaatioista
jonoista sekä
operaatioista  koottu logiikka-algebra) sovellus:
siirretään -bittisiä viestejä
(
koottu logiikka-algebra) sovellus:
siirretään -bittisiä viestejä
( ) häiriöisellä linjalla, joka voi
aiheuttaa mihin tahansa siirrettävään bittiin virheen
(ts.
) häiriöisellä linjalla, joka voi
aiheuttaa mihin tahansa siirrettävään bittiin virheen
(ts.  ) todennäköisyydellä , bitin sijainnista ja alkuperäisestä
arvosta riipumatta.
) todennäköisyydellä , bitin sijainnista ja alkuperäisestä
arvosta riipumatta.
-
Virherakenne
 :ssä
on niissä kohdissa joissa
siirretyssä viestissä on virhe ja
niissä, joissa bitti siirtyi oikein. Kun =virhebittien
(-bittien) määrä eli
virheen paino:
:ssä
on niissä kohdissa joissa
siirretyssä viestissä on virhe ja
niissä, joissa bitti siirtyi oikein. Kun =virhebittien
(-bittien) määrä eli
virheen paino:
-
Tietyn virherakenteen esiintymisen todennäköisyys on

-
Tasan virhettä
sisältävän siirron todennäköisyys on

-
Tietyn virherakenteen esiintymisen todennäköisyys on
-
 -blokkikoodaus muuttaa
-bittiset viestit -bittisiksi
jonoksi lisäämällä niihin
-blokkikoodaus muuttaa
-bittiset viestit -bittisiksi
jonoksi lisäämällä niihin  kpl. tarkistusbittejä jolloin koodauksen tehosuhde on
kpl. tarkistusbittejä jolloin koodauksen tehosuhde on  (
( ).
).
- Hamming-etäisyys on kahdessa bittijonossa toisistaan eroavien bittien määrä.
-
Kun viestejä välitetään käyttäen joukkoa koodisanoja, kaikki painoa
 olevat virheet voidaan:
olevat virheet voidaan:
-
havaita, jos eri koodisanojen minimietäisyys on
vähintään

-
korjata, jos eri koodisanojen minimietäisyys on
vähintään

-
havaita, jos eri koodisanojen minimietäisyys on
vähintään
-
Koodaus
 on ryhmäkoodi
joss sen tuottamat koodisanat ovat
on ryhmäkoodi
joss sen tuottamat koodisanat ovat  :n
aliryhmä. Ryhmäkoodeilla koodisanojen
Hamming-minimietäisyys on niiden nollasta eriävien
koodisanojen minimipaino (eli niiden keskinäisiä
etäisyyksiä ei tarvitsekaan laskea).
:n
aliryhmä. Ryhmäkoodeilla koodisanojen
Hamming-minimietäisyys on niiden nollasta eriävien
koodisanojen minimipaino (eli niiden keskinäisiä
etäisyyksiä ei tarvitsekaan laskea).
-
Koodauksen
generoiva matriisi on jolla
oikealta kertominen tuottaa viestisanoista
koodisanat:  (missä
on -vaakavektorina esitetty
viesti ja on -vektorina
esitetty koodisana). Esim: eräs
(missä
on -vaakavektorina esitetty
viesti ja on -vektorina
esitetty koodisana). Esim: eräs  -koodaus:
-koodaus:

-
Generoiva matriisi on normalisoitu eli
systemaattinen jos se on muotoa
 eli vasemmalla on alimatriisina yksikkömatriisi. Minkä
tahansa generoivan matriisin voi normalisoida ja tuloksena on
ekvivalentti koodaus.
eli vasemmalla on alimatriisina yksikkömatriisi. Minkä
tahansa generoivan matriisin voi normalisoida ja tuloksena on
ekvivalentti koodaus.
-
Tarkistusmatriisi on ,
jolle :n syndrooma eli
 joss on jokin
käytetyistä koodisanoista. Normalisoitu muoto on
joss on jokin
käytetyistä koodisanoista. Normalisoitu muoto on  . Huom: syndrooman laskussa
pystyvektorina esitetty viesti kerrotaan :lla vasemmalta.
. Huom: syndrooman laskussa
pystyvektorina esitetty viesti kerrotaan :lla vasemmalta.
-
Jos vastaanotetussa viestissä
 on virhe
vain yhdessä bitissä, i ,
on virhe
vain yhdessä bitissä, i ,  on :n :s pystyrivi. (Yleisesti:
syndrooma on virhebittejä vastaavien :n
pystyrivien summa.)
on :n :s pystyrivi. (Yleisesti:
syndrooma on virhebittejä vastaavien :n
pystyrivien summa.)
- Generoivalla matriisilla esitetty koodaus on ryhmäkoodi.
-
Hamming-koodaus: tarkistusmatriisi
 ] eli Hammingin matriisi on kokoa
] eli Hammingin matriisi on kokoa
 ja sen pystyrivit on koottu lukujen
ja sen pystyrivit on koottu lukujen  binääriesityksistä jossain
järjestyksessä. Vastaava generoiva (eli koodaus-) matriisi
on
binääriesityksistä jossain
järjestyksessä. Vastaava generoiva (eli koodaus-) matriisi
on  . Hamming-koodauksella siirretään
. Hamming-koodauksella siirretään
 -mittaisia viestejä, sillä voidaan
korjata yksi virhe ja sen tehosuhde on
-mittaisia viestejä, sillä voidaan
korjata yksi virhe ja sen tehosuhde on  .
.
9Kombinatoriikka
9.1Permutaatiot ja kombinaatiot
- permutaatio = uudelleenjärjestely/sekoitus
- kombinaatio = yhdistelmä, jossa järjestyksellä ei ole väliä
-
R-permutaatioiden määrä = “montako
erilaista :n pituista järjestettyä
jonoa voidaan muodostaa :stä eri
alkiosta“ =
 . Huom:
. Huom: 
-
R-kombinaatioiden määrä = “montako
erilaista :n kokoista joukkoa voidaan valita
:stä eri alkiosta kun
järjestyksellä ei ole väliä“ =
 . Huom:
. Huom: 
-
Toistopermutaatioiden määrä = “monellako toisistaan erottuvalla tavalla voidaan järjestää
kpl. :sta eri luokasta valittua alkiota, kun
luokasta 1 valitaan  kpl, luokasta 2 valitaan
kpl, luokasta 2 valitaan
 jne.” =
jne.” =
 (missä siis
(missä siis  )
)
-
Kyyhkyslakkaperiaate: “Jos on
 kyyhkystä ja
pesää, vähintään yhdessä
pesässä on 2 kyyhkystä” (kaikki voivat olla
myös samassa pesässä!)
kyyhkystä ja
pesää, vähintään yhdessä
pesässä on 2 kyyhkystä” (kaikki voivat olla
myös samassa pesässä!)
-
”
:n eri alkion mahdollisten
luokittelujen määrä :hon
luokkaan jaettaessa kun osa luokista saa olla tyhjiä“ =
“
:sta eri merkistä koottujen :n pituisten merkkijonojen pituus“ = 
-
Yhtälön
 ratkaisujen
määrä, kun
ratkaisujen
määrä, kun  =
=
“Monellako tapaa voidaan järjestää
pallon ja  erottimen muodostama
jono” =
erottimen muodostama
jono” =

“Monellako tavalla voidaan valita pallojen paikat” =

“Monellako tavalla voidaan valita erotinten paikat” =
 .
.
Esim:
“Monellako tavalla 7 eri henkilöä voi valita 4:stä eri ruokalajista?“ =
“Montako ratkaisua on positiivisella kokonaislukuyhtälöllä
 ?”=
?”=
“Monellako (erottuvalla) tavalla voidaan järjestää jono '|||ooooooo'?” =

-
Väärinjärjestysten
määrä = “Monellako tapaa voi
järjestää alkiota niin, ettei
mikään ole omalla paikallaan“ =
-
“:n eri alkion mahdollisten luokittelujen
määrä :hon ei-tyhjään
luokkaan jaettaessa” (esim.
 ) eli 2.
lajin Strilingin luvut =
) eli 2.
lajin Strilingin luvut =  (rekursiokaavana:
(rekursiokaavana: 
-
“:n eri alkion kaikkien mahdollisten
luokittelujen määrä” eli Bellin
luvut =

9.2Inkluusio-ekskluusio-periaate
Inkluusio-ekskluusio-periaatteella lasketaan osittain päällekkäisiä ehtoja täyttävien alkioiden / tapausten määriä: ensin päällekäisten joukkojen koot lasketaan yhteen ja sitten tuloksesta vähennetään niille yhteisten alkioiden määrä (ettei sitä oteta mukaan kahteen kertaan). Ongelmia kannattaa visualisoida Venn-diagrammilla. Merkintätapoja:
Joukko , jonka koko  ,
koostuu alkioista, jotka toteuttavat kukin joitain (tai vaikka kaikki
tai ei yhtään) :stä eri ehdosta
,
koostuu alkioista, jotka toteuttavat kukin joitain (tai vaikka kaikki
tai ei yhtään) :stä eri ehdosta
 (esim. esinettä
ja 4 ehtoa:
(esim. esinettä
ja 4 ehtoa:  =“alkio on pallo“,
=“alkio on pallo“,  =“alkio on vihreä“,
=“alkio on vihreä“,  ”alkio on sininen“,
”alkio on sininen“,  =”alkio
on painava” jne). Vähintään yhden ehdoista
=”alkio
on painava” jne). Vähintään yhden ehdoista  toteuttavien alkioiden määrää
merkitään
toteuttavien alkioiden määrää
merkitään  ja niitä, jotka
eivät toteuta niistä mitään (mutta voivat
toteuttaa jotain muita!) merkitään
ja niitä, jotka
eivät toteuta niistä mitään (mutta voivat
toteuttaa jotain muita!) merkitään  .
.
Ei yhtään ehtoa täyttäviä alkioita on:

Yleisesti: tasan ehtoa täyttäviä
alkioita on:

9.3Binomi- ja multinomikertoimet
Binomilause määrää termien kertoimet kun binomi kerrotaan auki polynomiksi:

Kerroin :nnen asteen :lle
on siis n:n k-kombinaatio. Binomikertoimia kuvataan usein Pascalin
kolmiolla, jonka jokainen reuna-alkio on 1 ja jokainen
sisäalkio aina kahden heti sen yläpuolella olevan alkion
summa. Multinomilause yleistää tuloksen:
Tulossa  , termin
, termin  kerroin on
kerroin on 
Joskus tarvitaan “binomikertoimia“, joissa  tai
tai  : yleistetyt binomikertoimet:
: yleistetyt binomikertoimet:

...tai jos :n tilalla onkin negatiivinen
kokonaisluku ( ) eikä desimaaliluku, niin:
) eikä desimaaliluku, niin:

9.4Generoivat funktiot eli emäfunktiot
Emäfunktiolla voi ratkaista mekaanisesti erilaisia kombinatorisia tehtäviä (“montako erilaista / monellako tavalla“ ja jopa “luettele kaikki“ eli enumerointi) esittämällä jonot polynomeina. Algebrallisen pyörityksen jälkeen tulos katsotaan suoraan polynomin halutun asteisteisten termien kertoimista eikä itse polynomiin sijoiteta mitään!
-
tavallinen emäfunktio
 (sopii kombinaatiolle)
(sopii kombinaatiolle)
-
eksponentiaalinen emäfunktio
 (permutaatioille)
(permutaatioille)
- muitakin emäfunktoita on (esim. kahden muuttujan versio)
Esim. (tavallinen emäfunktio): ”Montako positiivista
kokonaislukuratkaisua on yhtälöllä  ,
kun
,
kun  ja
ja  ?”
Tämä ratkeaa kertomalla auki polynomi (tavallinen
emäfunktio)...
?”
Tämä ratkeaa kertomalla auki polynomi (tavallinen
emäfunktio)...

...ja ottamalla siitä  :n kerroin (14).
Muuttujan potenssit esittävät :n, :n ja :n
arvoja ja niiden kertoimet (
:n kerroin (14).
Muuttujan potenssit esittävät :n, :n ja :n
arvoja ja niiden kertoimet ( , tässä
tapauksessa 1 kaikille mainituille ja muille 0) merkitsevät
“monellako tavalla kyseinen arvo voi tulla valituksi kyseiselle
muuttujalle”. Ym. lauseen voi siis lukea tulkitsemalla =“tai“, =“ja“
(kuten Boolen algebrassa): “jos (a=4 tai a=5 tai ...) ja (b=2 tai
b=3 tai ..) ja ...“. Auki kerrottu polynomi esittää
näiden eri kombinaatioita ja siitä näkee myös,
että esim.
, tässä
tapauksessa 1 kaikille mainituille ja muille 0) merkitsevät
“monellako tavalla kyseinen arvo voi tulla valituksi kyseiselle
muuttujalle”. Ym. lauseen voi siis lukea tulkitsemalla =“tai“, =“ja“
(kuten Boolen algebrassa): “jos (a=4 tai a=5 tai ...) ja (b=2 tai
b=3 tai ..) ja ...“. Auki kerrottu polynomi esittää
näiden eri kombinaatioita ja siitä näkee myös,
että esim.  ratkaisuja olisi 16 kpl.
ratkaisuja olisi 16 kpl.
Polynomien kertominen keskenään on työlästä,
joten laskemisessa hyödyllisiä ovat potenssisarjojen
laskusäännöt (Huom: suppenevuusehdoilla
ei tässä ole mitään väliä, koska :ään ei oikeasti sijoiteta mitään):
A) äärettömät jonot (sarjat):
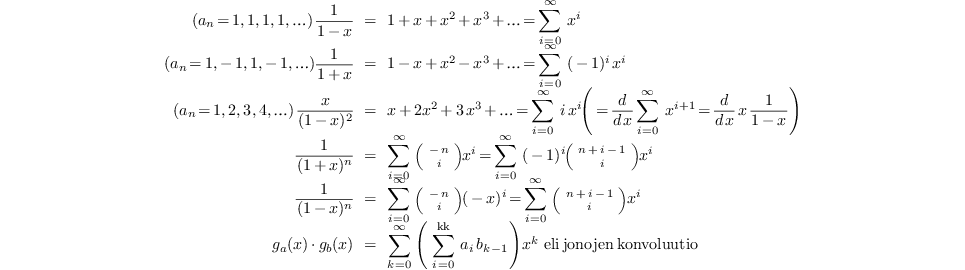
B) äärelliset jonot:

C) (permutaatioiden laskemista varten) eksponenttifunktiot:
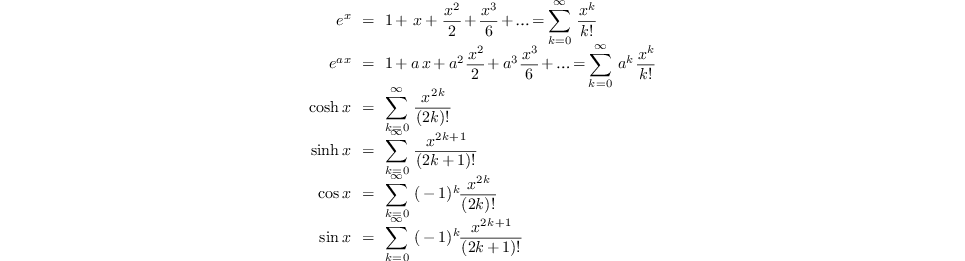
Epäsäännöllisempiä sarjoja voi
esittää laskemalla eri emäfunktioita yhteen tai
vähentämällä yksittäisiä termejä,
esim.  .
.
Ongelmassa esiintyvät jonot kirjoitetaan ensin emäfunktioiksi (eli ”siirrytään taulukossa oikealta vasemmalle”), sievennetään sitten niiden yhdistelmä (esim. summa) ja muutetaan tulos sitten takaisin sarjamuotoon (ts. “taulukossa takaisin vasemmalta oikealle”). Menettely muistuttaa siis hieman Laplace-muunnoksen käyttöä ja myös emäfunktioissa “käänteismuunnos” vaatii usein osamurtokehitelmää (esimerkki differenssiyhtälöt-kappaleen lopussa).
Joitain generoivia funktioita (Huom! nämä siis määrittelevät lukujonoja, eivätkä annan itse määriä!):
-
Väärinjärjestysten määrä:

-
Fibonaccin luvut (
 ):
):  (
( )
)
-
Catalanin luvut (
 eli
esim. “Erilaisten -kärkisten
binääripuiden määrä“):
eli
esim. “Erilaisten -kärkisten
binääripuiden määrä“):  (
( )
)
-
“Luvun ositusten
määrä
 ”:
”:  .
Ositus = luvun kokoaminen termeistä
.
Ositus = luvun kokoaminen termeistä  (esim. 4=1+3=1+1+2=2+2=4). Tekijät
eivät vaikuta vastaukseen, joten äärettömän
tulon voi katkaista ja käyttää (kertomalla versiot
(esim. 4=1+3=1+1+2=2+2=4). Tekijät
eivät vaikuta vastaukseen, joten äärettömän
tulon voi katkaista ja käyttää (kertomalla versiot  yhteen) sarjaa
yhteen) sarjaa  .
.
9.5Tornipolynomit (rook polynomials)
-
Tornipolynomi = emäfunktio, jolla lasketaan
“Monellako tavalla voidaan asettaa
toisiaan uhkaamatonta (nontaking) tornia tietyn muotoiselle
shakkilaudalle kun osa ruuduista on kiellettyjä (
 )?”
)?”
- ”Uhkaamaton” = mikään nappula ei saa olla samalla rivillä eikä sarakkeella toisen kanssa.
-
Vastausta merkitään
 kun on lauta. Esim.
kun on lauta. Esim.  ja
ja  , kun
, kun  .
.
-
Tornipolynomi
 generoi
generoi  :n
kaikille . Esim:
:n
kaikille . Esim: 
(tarkoittaa: 1 tapaa asettaa 0 tornia, 6 tapaa 1 torni, 8 tapaa 2 ja 2 tapaa 3 tornia)
-
Jos kiellettyjä ruutuja on vähemmän kuin sallittuja, voidaan laskea käänteisen (vaihdetaan kielletyt
 sallitut) laudan polynomi ja solveltaa
inkluusio-ekskluusio-kaavaa:
sallitut) laudan polynomi ja solveltaa
inkluusio-ekskluusio-kaavaa:

(MUTTA: miten saa
:n
mielivaltaiselle eikä vain tapaukselle
 ??)
??)
-
Jos lauta koostuu erillisistä osista
 (ts. ei yhteisiä rivejä eikä sarakkeita), on koko
laudan polynomi sen erillisten osien polynomien tulo:
(ts. ei yhteisiä rivejä eikä sarakkeita), on koko
laudan polynomi sen erillisten osien polynomien tulo:

-
Lautaa voidaana jakaa kahdella tekniikalla vaikka erillisiä osia ei heti näkyisikään:
- siirtelemällä rivejä ja sarakkeita (ei vaikuta tulokseen)
-
valitsemalla yksi rutuu jostain strategisesta paikasta ja laskemalla yhteen tapaukset, joissa siinä a) on nappula [poistetaan myös kaikki sen uhkaamat ruudut] tai b) ei ole nappulaa [poistetaan vain kyseinen ruutu]

Esimerkki: Johdetaan ym.  :n tornipolynomi ilman
käänteisen laudan temppua, sijoittamalla kokeeksi nappula
vasemmalle ylös laudanjakotekniikan 2 mukaisesti:
:n tornipolynomi ilman
käänteisen laudan temppua, sijoittamalla kokeeksi nappula
vasemmalle ylös laudanjakotekniikan 2 mukaisesti:

9.6Differenssiyhtälöt eli rekursiot
(...eli rekurrenssiyhtälöt eli palautuskaavat)
-
Alkion arvo riippuu :sta
edellisestä alkiosta ja :stä:
 . Vakio on
differenssiyhtälön kertaluku.
. Vakio on
differenssiyhtälön kertaluku.
- Terminologia pitkälti samaa kuin differentiaaliyhtälöissä
- Homogeenisten, lineaaristen yhtälöiden yleiset ratkaisut saa erityisratkaisujen lineaarikombinaationa (kuten differentiaaliyhtälöissäkin)
- Helpoille tapauksille on ratkaisukaavoja ja hankalampiin voi usein käyttää emäfunktioita
9.6.1Lineaariset ja vakiokertoimiset
Ratkaisukaavoja:
-
Ensimmäisen kertaluvun vakiokertoimisen, lineaarisen ja homogeenisen yhtälön eli
 (tai
(tai  ) yleinen
ratkaisu on
) yleinen
ratkaisu on  (kun ).
Huom:
(kun ).
Huom:  .
.
-
Toisen kertaluvun vakiokertoiminen, lineaarinen ja homogeeninen yhtälö (kuten Fibonaccin luvut) eli
 (missä
(missä  ) ratkeaa sijoittamalla :n tilalle yritefunktioksi
ensimmäisen kertaluvun ratkaisu :
) ratkeaa sijoittamalla :n tilalle yritefunktioksi
ensimmäisen kertaluvun ratkaisu :

Tämä on karakteristinen polynomi ja rekursion ratkaisu riippuu sen juurista
ja
lineaarikombinaatiolla:
-
2 reaalista, erisuurta juurta
 (
( ovat mielivaltaisia vakioita)
ovat mielivaltaisia vakioita)
-
kompleksikonjugaatit samalla tavalla ( ja eliminoivat
toistensa imaginääriosat), mutta laskeminen on
vähän hankalampaa ja se kannattaa tehdä
polaarikoordinaateissa kompleksiluvun potenssiin korotuksen takia
-
kaksinkertainen juuri (eli
 )
) 
Sama konsti toimii korkeammankin kertaluvun yhtälöille, mutta polynomin ratkaisu menee turhan hankalaksi.
-
2 reaalista, erisuurta juurta
-
Epähomogeenisten versioiden ratkaisut saa kaavasta
 eli homogeenisen version yleinen ratkaisu +
epähomogeenisen jokin yksittäisratkaisu. Jos
epähomogeeninen osa sattuu olemaan
muotoa
eli homogeenisen version yleinen ratkaisu +
epähomogeenisen jokin yksittäisratkaisu. Jos
epähomogeeninen osa sattuu olemaan
muotoa  , niin:
, niin:
-
Ensimmäinen kertaluku (eli
 ):
):
-
 jos se ei satu olemaan myös
jos se ei satu olemaan myös  :n ratkaisu tai
:n ratkaisu tai
-
 , jos sattuu
, jos sattuu
-
-
Toinen kertaluku:
-
jos se ei satu olemaan myös :n ratkaisu tai
-
 jos sattuu, ja
on muotoa
jos sattuu, ja
on muotoa  tai
tai
-
 jos sattuu, ja
on muotoa
jos sattuu, ja
on muotoa 
-
-
9.6.2Ratkaisu emäfunktioilla
Ideana on etsiä ensin rekursiota esittävä emäfunktio suljetussa muodossa (potenssisarjojen laskusäännöillä) ja sitten etsiä toiseen suuntaan sitä vastaava sarja.
Esimerkki: “Mikä on sarjan  :s alkio?”
:s alkio?”
-
Valitaan ja nimetään sarjaan “sovitettava”
emäfunktio – valitaan tässä:
 (eli tavallinen emäfunktio)
(eli tavallinen emäfunktio)
-
Esitetään molemmat puolet
 :n avulla
(siten, ettei yhtään :ää
jää jäljelle). Aloitetaan kertomalla
:n avulla
(siten, ettei yhtään :ää
jää jäljelle). Aloitetaan kertomalla  :llä
ja summataan sitten
:llä
ja summataan sitten  yli.
yli.

-
Ratkaistaan
:n suhteen:

-
Etsitään saadulle emäfunktiolle sarjaesitys. Käytetään osamurtokehitelmää (Heaviside) ja potenssisarjojen laskusääntöjä:

Viimeisestä summasta nähdään suoraan, että
emäfunktion sarjaesityksen :s kerroin, eli
alkuperäisen sarjan , on  .
.
9.7Permutaatioryhmät ja ekvivalenssiluokat
Tulkitaan geometrisen objektin (esim. neliön) eri värisiksi värjättyjen kärkien kiertoja ja peilauksia/3D-rotaatiota (eli liikeryhmää) permutaatioina ja lasketaan montako erinäköistä objektia voidaan tehdä jos niitä saadaan pyöritellä vapaasti. Määritelmiä:
-
symmetrinen ryhmä
 on
bijektioiden
on
bijektioiden  muodostama algebrallinen
ryhmä (ts. :n alkion kaikkien erilaisten
permutaatiofunktioiden ryhmä)
muodostama algebrallinen
ryhmä (ts. :n alkion kaikkien erilaisten
permutaatiofunktioiden ryhmä)
-
permutaatioryhmä tarkoittaa
 :n aliryhmää, ts.
:n aliryhmää, ts.  ,
vaikka olisikin
,
vaikka olisikin 
-
tulo
 (”tyhjä operaattori”)
tarkoittaa yhdistettyä (2 peräkkäin tehtyä)
permutaatiota
(”tyhjä operaattori”)
tarkoittaa yhdistettyä (2 peräkkäin tehtyä)
permutaatiota
-
permutaatioryhmä ei ole kommutatiivinen (aabelin ryhmä), jos
 . Suomeksi: permutaatioiden järjestyksen
vaihtaminen voi muuttaa tulosta.
. Suomeksi: permutaatioiden järjestyksen
vaihtaminen voi muuttaa tulosta.
-
Caleyn lause: ”jokainen ryhmä voidaan
esittää permutaatioryhmänä” eli sille on
isomorfismi viimeistään :ään
(ja usein jo
 :ään, missä ).
:ään, missä ).
-
permutaation matriisiesitys:
 ,
josta näkee mikä alkio vaihtuu minkäkin paikalle.
,
josta näkee mikä alkio vaihtuu minkäkin paikalle.
-
Toinen esitystapa: erillisten syklien tulo eli
erilliset esittäjät:
 (sama permutaatio
(sama permutaatio  kuin edellisen esimerkin
matriisissa). Tässä edellinen vaihtuu aina seuraavan
paikalle ja viimeinen pyörähtää ensimmäisen
tilalle. Esim:
kuin edellisen esimerkin
matriisissa). Tässä edellinen vaihtuu aina seuraavan
paikalle ja viimeinen pyörähtää ensimmäisen
tilalle. Esim:  . Yhden mittainen sykli = alkio
ei vaihda paikkaa.
. Yhden mittainen sykli = alkio
ei vaihda paikkaa.
Kun merkitään kärkien eri väritystapoja
(konfiguraatioita)  :llä (neliön ja
kahden värin tapauksessa niitä on yhteensä
:llä (neliön ja
kahden värin tapauksessa niitä on yhteensä  kpl:
kpl:  ) ja permutaatioita
) ja permutaatioita  :llä (neliön tapauksessa 8 kpl, kun lasketaan
erilaiset kierrot ja peilaukset:
:llä (neliön tapauksessa 8 kpl, kun lasketaan
erilaiset kierrot ja peilaukset:  , missä
, missä
 =
=  kierto = ”ei
muutosta”), niin:
kierto = ”ei
muutosta”), niin:
-
Ekvivalenssiluokka on niiden väritystapojen
 joukko, jotka voidaan muttaa toistensa
näköisiksi :n permutaatioilla. Ts.
ekvivalenssiluokkien määrä = “oikeasti
erilaisten” väritysten määrä.
joukko, jotka voidaan muttaa toistensa
näköisiksi :n permutaatioilla. Ts.
ekvivalenssiluokkien määrä = “oikeasti
erilaisten” väritysten määrä.
-
Väritystavan
 -rata on niiden väritystapojen joukko, joiden
näköisiksi :n permutaatiot voivat
:n muuttaa. Sen -rata
(
-rata on niiden väritystapojen joukko, joiden
näköisiksi :n permutaatiot voivat
:n muuttaa. Sen -rata
( ) taas on niiden väritysten joukko,
joiksi ryhmä
) taas on niiden väritysten joukko,
joiksi ryhmä  (eli :n
potenssien muodostama :n aliryhmä) voi sen
muuttaa.
(eli :n
potenssien muodostama :n aliryhmä) voi sen
muuttaa.
-
Värityksen/konfiguraation
stabilisaattori on aliryhmä
 , jonka sisältämät permutaatiot eivät
muuta :stä lainkaan
, jonka sisältämät permutaatiot eivät
muuta :stä lainkaan
-
:n kiintopiste on jokin
, joka ei muutu millään
permutaatiolla
 . Tasaväritykset ovat
tietysti aina kiintopisteitä.
. Tasaväritykset ovat
tietysti aina kiintopisteitä.
-
Burnsiden lemma:
 =
ekvivalenssiluokkien määrä, kun
=
ekvivalenssiluokkien määrä, kun  = “:tä sovellettaessa
muuttumattomien konfiguraatioiden määrä”.
= “:tä sovellettaessa
muuttumattomien konfiguraatioiden määrä”.
Esimerkki: “monellako tavalla 6 ihmistä voi sijoittaa pyöreän pöydän ympärille?”.
 kierto, kun
kierto, kun  . Erilaisia
konfiguraatioita pyörittämättömälle
pöydälle on
. Erilaisia
konfiguraatioita pyörittämättömälle
pöydälle on  , joten
, joten  ja koska kukaan ei pysy paikallaan
vähänkään pyöritettäessä,
ja koska kukaan ei pysy paikallaan
vähänkään pyöritettäessä,  . Vastaus:
. Vastaus:  . (Yleisesti:
syklinen järjestys voidaan valita
. (Yleisesti:
syklinen järjestys voidaan valita  tavalla.)
tavalla.)
-
Sykli-indeksi helpottaa laskemista:
 :n sykli-indeksiesitys on
:n sykli-indeksiesitys on  ,
,  :n esitys on
:n esitys on  ja esim.
ja esim.  :n on
:n on  .
Sykli–indeksi...
.
Sykli–indeksi...

...antaa
:n eri värin värityksen
ekvivalenssiluokkien määrän sijoituksella  .
.
-
Polyan lause: kun on käytettävissä
eri
väriä, erilaisten väritysten inventaariolle, eli eri kombinaatioiden määrien
luetteloinnille, saadaan emäfunktio sijoituksella...

...missä
 on väriä esittävä muuttuja. Huom: :n
ei sijoiteta mitään vaan tulos katsotaan kertoimista,
koska kyseessä on emäfunktio.
on väriä esittävä muuttuja. Huom: :n
ei sijoiteta mitään vaan tulos katsotaan kertoimista,
koska kyseessä on emäfunktio.
Esim.: “Montako eri tapaa on värittää 3-lapainen potkuri kun väreinä on r,g ja b?” Permutaatioryhmä
 eli kierrot
eli kierrot  ,
,  ja
ja  ,
joiden sykli-indeksiesitykset ovat
,
joiden sykli-indeksiesitykset ovat  ja
ja  .
Inventaario-emäfunktio saadaan siis seuraavasti:
.
Inventaario-emäfunktio saadaan siis seuraavasti:

Polynomista nähdään, että on 2 eri tapaa (termi
 ) kun käytetään kaikkia kolmea
väriä (ja 1 tapa kaikilla muilla
värikombinaatioilla). Termien kertoimia voi usein laskea
multinomilauseen avulla kertomatta koko polynomia auki.
) kun käytetään kaikkia kolmea
väriä (ja 1 tapa kaikilla muilla
värikombinaatioilla). Termien kertoimia voi usein laskea
multinomilauseen avulla kertomatta koko polynomia auki.
10Jaollisuus ja moduloaritmetiikka
-
Jos on jaollinen :llä,
sanotaan " jakaa :n"
ja merkitään:
 . Jos
. Jos  ,
jakaa sanotaan :n jakavan
aidosti (vrt. "aito osajoukko (
,
jakaa sanotaan :n jakavan
aidosti (vrt. "aito osajoukko ( vs.
vs.  )").
)").
-
Alkuluku on luku, jolla ei ole yhtään
:stä poikkeavaa aitoa tekijää.
-
Aritmetiikan peruslause: jokainen positiivinen
kokonaisluku voidaan esittää
yksikäsitteisesti alkulukujen tulona (eli
 )
jokainen ei-alkuluku on jaollinen jollain
alkuluvu(i)lla
)
jokainen ei-alkuluku on jaollinen jollain
alkuluvu(i)lla
10.1Jaollisuussääntöjä
-

-

-
Jos
 ja jakaa kaksi
muuttujista, jakaa se kaikki kolme.
ja jakaa kaksi
muuttujista, jakaa se kaikki kolme.
-
Jos jakaa luvut
 , jakaa
se myös näiden lineaarikombinaatiot:
, jakaa
se myös näiden lineaarikombinaatiot:  .
.
-
Luvut ja ovat
suhteellisia alkulukuja eli keskenään
jaottomia, jos niiden suurin yhteinen tekijä on eli
 eli on olemassa
eli on olemassa  siten, että
siten, että  .
.
10.1.1Suurin yhteinen tekijä (GCD) ja pienin yhteinen jaettava (LCM)
Suurin yhteinen tekijä (syt
tai gcd, Greatest Common Denominator)
merkitään  tai
tai  ja on suurin luku , joka jakaa kaikki eli
ja on suurin luku , joka jakaa kaikki eli  . Kahdelle muuttujalle voidaan
merkitä myös
. Kahdelle muuttujalle voidaan
merkitä myös  , missä .
, missä .
S.y.t löytyy Euklideen algoritmilla: jaetaan
joka askeleella jäljellä oleva luku edellisen askeleen
jakojäännöksellä ja lopetetaan kun
jäännöksestä tulee 0. Viimeinen ei-nolla
jäännös on s.y.t. Algoritmi toimii myös useammalle
kuin kahdelle luvulle, sillä  . Esim.
. Esim.  :
:

Lineaarikombinaatioesityksen kertoimet ja (ja sen avulla Diophanteen
yhtälön ratkaisun) löytää tästä
peruuttamalla. Aluksi ratkaistaan ketjun toiseksi viimeinen rivi
jakojäännöksen suhteen, sitten ratkaistaan edellinen rivi
samalla tavalla, yhdistetään ne ja supistetaan, ratkaistaan
kolmanneksi viimeinen rivi ja jatketaan samaan tapaan alkuun asti:

Pienin yhteinen jaettava (pyj
tai lcm, Least Common Multiple)
merkitään  tai
tai  ja on pienin luku, jonka kaikki jakavat eli li
ja on pienin luku, jonka kaikki jakavat eli li
 .
.


10.1.2Lineaariset Diophanteen yhtälöt
Diophanteen yhtälö on yhtälö,
jonka ratkaisuksi sallitaan vain kokonaislukja. Lineaarinen kahden
muuttujan versio: , jossa  .
.
-
Ratkaisuja on olemassa (äärettömästi) joss
 .
.
-
Yksittäisratkaisun
 jälkeen yleisen
ratkaisun saa kaavalla
jälkeen yleisen
ratkaisun saa kaavalla

...missä
 ja
ja  tarkoittavat s.y.t:llä
tarkoittavat s.y.t:llä  jaettuja
versioita kertoimista. Huom! :n kohdalla on
ja :n kohdalla eikä päinvastoin!
jaettuja
versioita kertoimista. Huom! :n kohdalla on
ja :n kohdalla eikä päinvastoin!
-
Yksittäisratkaisun saa mekaanisesti ratkomalla Euklideen algoritmin jälkeen peruutuksella
:n ja
:n yhtälöstä  ja kertomalla ne sitten
ja kertomalla ne sitten  :llä. Esim:
ratkaistaan
:llä. Esim:
ratkaistaan  :
:
-
Etsitään edellisen kappaleen Euklid-esimerkin mukaan

-
Etsitään peruutustekniikalla ratkaisut
 väliaikaiselle yhtälölle
väliaikaiselle yhtälölle  (myöskin edellisen kappaleen esimerkin mukaan)
(myöskin edellisen kappaleen esimerkin mukaan)
-
Todetaan, että
 ja sen perusteella,
että
ja sen perusteella,
että  eli
eli 
-
Etsitään edellisen kappaleen Euklid-esimerkin mukaan
10.2Kongruenssi eli moduloaritmetiikka
-
"kongruenssi modulo "
merkitään
 ja tarkoittaa, että
ja tarkoittaa, että
 eli
eli 
-
Kongruenssiluokka (eli
jäännösluokka eli
ekvivalenssiluokka) merkitään
 , ja se tarkoittaa kongruenssiaritmetiikan numeroa.
Esim:
, ja se tarkoittaa kongruenssiaritmetiikan numeroa.
Esim:  modulin
modulin  suhteen
(koska
suhteen
(koska  ja
ja  )
)
-
Kongruensiluokan käänteisluokka
 on
on  siten, että
siten, että  . Esim:
. Esim:  , koska
, koska 
-
Kongruenssiyhtälö
 vastaa Diophanteen yhtälöä
vastaa Diophanteen yhtälöä  .
.
-
Kongruenssiaritmetiikka tietyllä modulolla
vastaa algebrallista rengasta (tai kun on
alkuluku niin kuntaa) (ks. ”renkaat ja
kunnat” kappaleesta ”abstrakti algebra”).
-
Käänteisluokka on olemassa kaikille luokille joss (=moduli) on alkuluku. Tällöin vain 1 ja -1
ovat itsensä käänteisalkioita (ts.
 ).
Muillakin moduleilla voi kyllä olla yksittäisiä
käänteistyviä luokkia.
).
Muillakin moduleilla voi kyllä olla yksittäisiä
käänteistyviä luokkia.
-
Korkea potenssi
 lasketaan ottamalla välituloksista jakojäännös ja
jatkamalla siitä. Tehokas tapa
lasketaan ottamalla välituloksista jakojäännös ja
jatkamalla siitä. Tehokas tapa  :n
laskemiseen on laskea ensin
:n
laskemiseen on laskea ensin  peräkkäisillä neliöinneillä ja kertoa
niitä sitten yhteen :n
binääriesityksen mukaan ottamalla
joka askeleen jälkeen.
peräkkäisillä neliöinneillä ja kertoa
niitä sitten yhteen :n
binääriesityksen mukaan ottamalla
joka askeleen jälkeen.
-
Wilsonin lause:
 , kun
on alkuluku. Ei ole
käytännöllinen alkulukutesti, koska kertoman laskeminen
on hidasta.
, kun
on alkuluku. Ei ole
käytännöllinen alkulukutesti, koska kertoman laskeminen
on hidasta.
-
Fermat'n pieni lause:
 ,
kun (ei joss!) on alkuluku ja
,
kun (ei joss!) on alkuluku ja
 (ts. ei ole :n tekijä, ts.
(ts. ei ole :n tekijä, ts.  )
)
-
Eulerin fii-funktio
 on alkioiden
on alkioiden  , joille
, joille  , eli :ää pienempien
suhteellisten alkulukujen, määrä.
Sääntöjä:
, eli :ää pienempien
suhteellisten alkulukujen, määrä.
Sääntöjä:
 joss
joss 
 , niin
, niin 
 (kun
(kun  ) eli
) eli  , kun
, kun
 , saadaan
, saadaan
 mod
mod 10.3Suuret alkuluvut
- Alkulukuja on äärettömän paljon.
- On olemassa sekä alkulukukaksosia, joiden erotus on 2, että mielivaltaisen pitkiä lukujonoja joissa ei ole yhtään alkulukua.
-
Luvun
 hajottaminen alkutekijöihin on
erittäin raskas operaatio. Huomioita:
hajottaminen alkutekijöihin on
erittäin raskas operaatio. Huomioita:
-
Jos pienillä alkuluvuilla testatessa tulee osuma, ts.
 , hakua :lle
pitää jatkaa :stä (sama
tekijä voi esiintyä useita kertoja)
, hakua :lle
pitää jatkaa :stä (sama
tekijä voi esiintyä useita kertoja)
-
:n alkutekijöissä voi olla max. 1
alkuluku
 . Kaikki muut ovat tätä
pienempiä on
alkuluku ellei
. Kaikki muut ovat tätä
pienempiä on
alkuluku ellei  mukaan lukien ole
löytynyt yhtään tekijää
mukaan lukien ole
löytynyt yhtään tekijää
-
Tehokkain tunnettu tekijöintialgoritmi on
työmäärältään

-
Jos pienillä alkuluvuilla testatessa tulee osuma, ts.
-
Fermat'n pienellä lauseella (
 , kun on alkuluku) voi usein todeta, että ei ole alkuluku, mutta se ei ole pitävä testi.
, kun on alkuluku) voi usein todeta, että ei ole alkuluku, mutta se ei ole pitävä testi.
-
”Pseudoalkuluku kannassa ” on jaollinen luku ,
joka läpäisee Fermat'n pienen lauseen testin ja jolle
 . Niitäkin on äärettömän
monta, mutta paljon harvemmassa kuin oikeita alkulukuja.
. Niitäkin on äärettömän
monta, mutta paljon harvemmassa kuin oikeita alkulukuja.
-
Carmichaelin luku on pseudoalkuluku kaikissa
kannoissa
 . Erittäin harvinaisia, mutta
niitäkin oletetaan olevan äärettömästi. Fermat'n pieni lause ei teoriassakaan ole aivan
täydellinen alkulukutesti.
. Erittäin harvinaisia, mutta
niitäkin oletetaan olevan äärettömästi. Fermat'n pieni lause ei teoriassakaan ole aivan
täydellinen alkulukutesti.
-
Millerin testi: pariton
ei ole alkuluku jos, kun  on pariton, joko:
on pariton, joko:
-
 tai
tai
-
 jollekin
jollekin 
-
-
”Vahva pseudoalkuluku kannassa
” on jaollinen luku ,
joka läpäisee Millerin testin kannassa .
Vain oikeat alkuluvut läpäisevät testin kaikissa
kannoissa
 .
.
-
Rabinin todennäköisyystesti:
todennäköisyys sille, että jaollinen luku on vahva pseudoalkuluku kaikissa kannoissa
 on pienempi kuin
on pienempi kuin  .
.
10.3.1RSA-salakirjoitus
-
Avaimien luonti: valitaan kaksi alkulukua
 ja
lasketaan niiden tulo
ja
lasketaan niiden tulo  .
.
-
Julkinen avain eli salakirjoitusavain on pari
 ,
missä on jokin luku, jolle
,
missä on jokin luku, jolle  .
.
-
Salainen avain eli purkuavain on pari
 ,
missä
,
missä  .
.
-
Julkinen avain eli salakirjoitusavain on pari
-
Viesti muutetaan/jaetaan lohkoiksi

-
Salaus:

-
Purku:

- Allekirjoituksessa käytetään avaimia nurinperin: salataan purkuavaimella ja puretaan salausavaimella.
-
Luvuilla
 ja
ja  pitää olla suuria tekijöitä ja :n
ja :n on oltava jonkin verran eri pituisia,
ettei
pitää olla suuria tekijöitä ja :n
ja :n on oltava jonkin verran eri pituisia,
ettei  ratkea liian helposti. Luvut ovat niin
suuria, että käytännössä sovelletaan Rabinin
todennäköisyystestiä, koska täydellisen Millerin
testin ajo kestäisi liian kauan.
ratkea liian helposti. Luvut ovat niin
suuria, että käytännössä sovelletaan Rabinin
todennäköisyystestiä, koska täydellisen Millerin
testin ajo kestäisi liian kauan.
11Graafit
- Silmukka (loop) on sivu, joka alkaa ja päättyy samaan solmuun (älä sekoita kierrokseen (cycle)!)
- Kierros on polku, jonka alku- ja loppusolmu ovat samat
- Lineaarinen eli yksinkertainen graafi on sellainen, jossa jokaista mahdollista sivua on korkeintaan yksi eikä siinä ole yhtään silmukkaa - ei-lineaarinen graafi on multigraafi
- Kaksi solmua ovat naapureita, jos niiden välillä on sivu
- Kaksi solmua on yhdistetty, jos niiden välillä on jokin polku
- Graafi on täydellinen, joss kaikki kärjet on yhdistetty kaikkiin muihin kärkiin
-
Graafin ja sen aligraafin
 komplementti
komplementti  on muuten
sama kuin , mutta siitä on poistettu
on muuten
sama kuin , mutta siitä on poistettu  :n sivut
:n sivut
- Graafi on yhtenäinen, jos kaikkien solmujen välillä on polku
- Puu on suunnistamaton, lineaarinen, yhtenäinen, kierrokseton graafi, metsä muuten sama, mutta ei yhtenäinen
- Suunnistamattoman graafin kärjen aste on siihen tulevien sivujen määrä - suunnistetulle on määritelty erikseen tuloaste ja lähtöaste.
-
Graafit ovat isomorfisia (
 ,
jos niillä on sama rakenne (eli voidaan määritellä
kääntäen yksikäsitteiset funktiot, jotka mappaavat
solmut ja sivut graafista toiseen)
,
jos niillä on sama rakenne (eli voidaan määritellä
kääntäen yksikäsitteiset funktiot, jotka mappaavat
solmut ja sivut graafista toiseen)
-
Graafin sulkeuma
 on
yleistetyn naapurimatriisin :s potenssi ja
ilmaisee solmusta toiseen olevien n-pituisten polkujen
määrän
on
yleistetyn naapurimatriisin :s potenssi ja
ilmaisee solmusta toiseen olevien n-pituisten polkujen
määrän
- Graafien konfiguraatio on sama, jos ne ovat isomorfisia kun molemmista poistetaan ne ja poistetaan astetta 2 olevat kärjet
- Eulerin polku käsittää kaikki sivut tasan kerran (vastaavasti Eulerin kierros)
- Hamiltonin polku käsittää kaikki solmut tasan kerran (vastaavasti Hamiltonin kierros)
11.1Lauseita
- Eulerin kierros suunnistamattomassa graafissa on olemassa joss graafi on yhtenäinen ja kaikkien solmujen asteet ovat parillisia. Eulerin polku joss tasan kaksi paritonta kärkeä (jotka voitaisiin periaatteessa yhdistää, jolloin saadaan kierros).
-
Hamiltonin polulle/kierrokselle ei ole yksikäsitteistä olemassaololausetta, mutta:
-
polkua ei ole ainakaan, jos on yli 2 kärkeä, joiden aste

-
kierros on olemassa ainakin, jos kaikkien kärkien aste

-
polkua ei ole ainakaan, jos on yli 2 kärkeä, joiden aste
-
Graafi on tasograafi (eli
levitettävissä tasoon ilman leikkaavia sivuja) joss se ei
sisällä kaksijakoisen graafin
 (3+3
solmua kahdessa rivissä, ylärivin kaikki solmut yhdistetty
kaikkiin alarivin solmuihin mutta ei toisiin ylärivin solmuihin,
ts. 9 sivua) eikä täydellisen 5-graafin
(3+3
solmua kahdessa rivissä, ylärivin kaikki solmut yhdistetty
kaikkiin alarivin solmuihin mutta ei toisiin ylärivin solmuihin,
ts. 9 sivua) eikä täydellisen 5-graafin  konfiguraatiota. (=Kuratowskin lause)
konfiguraatiota. (=Kuratowskin lause)
-
Yhtenäinen tasograafi rajaa tasolle
 aluetta, ääretön alue mukaan lukien (=Eulerin
kaava)
aluetta, ääretön alue mukaan lukien (=Eulerin
kaava)
-
Jos tasograafissa on yli 1 sivu ja tasoalueita
kpl, on
 ja
ja  .
.
-
Jos graafin kaikkien kärkien aste on , voi
sivujen määrän laskea kaavalla
 ,
sillä "jokainen kärki on yhteinen :lle
sivulle ja yhden sivun määräämiseen tarvitaan
kaksi kärkeä".
,
sillä "jokainen kärki on yhteinen :lle
sivulle ja yhden sivun määräämiseen tarvitaan
kaksi kärkeä".
11.2Algoritmeja (ei-negatiivisesti) painotetuille graafeille
Seuraavat klassiset graafialgoritmit ovat ns. ahneita algoritmeja:
- Primin algoritmi minimaalisen virittäjäpuun hakemiseen (eli priority first search): ensin lisätään jonoon kaikki naapureihin johtavat sivut joiden paino on pienempi kuin jo jonossa ehkä olevan, samaan solmuun johtavan sivun, sitten valitaan jonosta pienimmän painoinen sivu ja toistetaan kunnes kaikki solmut on käyty läpi.
- Dijkstran minimipolkualgoritmi: kuin Primin algoritmi, mutta lähdetään tietystä solmusta, lisätään jonoon aina painojen summa (eikä pelkästään sivun omaa painoa) ja lopetetaan kun tultu kohdesolmuun.
- Kruskalin algoritmi minimaalisen viritäjäpuun hakemiseen: valitaan yksitellen pienin jäljellä oleva sivu, joka ei muodosta kierrosta jo valittujen kanssa. (Kierrostarkistus voidaan tehdä merkitsemällä jokaiseen sivuun mihin tulosmetsän puuhun se kuuluu ja yhdistämällä vain eri alipuita keskenään. Alipuiden yhdistämisessä toisen puun tunnus aina hävitetään, joten lopuksi on jäljellä vain yksi puu.)
11.3Kaksijakoinen graafi (bipartite graph)
- Graafi on kaksijakoinen joss se voidaan jakaa kahteen joukkoon siten, että sivuja on vain niihin kuuluvien kärkien välillä (ei siis saa olla esim. kierroksia)
-
Kärjet piirretään yleensä kahteen riviin niin,
että joukon 1 () kärjet ovat
ylhäällä ja joukon 2
 alhaalla.
alhaalla.
-
Tyypillinen käyttöesimerkki on
avioliitto-/opiskelupaikkaongelma, jossa henkilöt luettelevat heille kelpaavat puolisot/koulut
 :stä (ts. preferenssit esitetään sivuina)
ja sitten yritetään löytää kaikille sopiva
järjestely.
:stä (ts. preferenssit esitetään sivuina)
ja sitten yritetään löytää kaikille sopiva
järjestely.
- Kaksijakoisen graafin sovitus on joukko sivuja, joilla ei ole yhteisiä kärkiä
- Sovitus on maksimaalinen, jos ei ole olemassa enemmän sivuja sisältäviä sovituksia.
-
:n jonkin osajoukon
 ulottuvuus
ulottuvuus  on kaikkien
siihen sivuilla kytkettyjen -kärkien
joukko.
on kaikkien
siihen sivuilla kytkettyjen -kärkien
joukko.
-
Osajoukon vaje on
kokonaisluku
 . Huom: voi olla negatiivinen!
. Huom: voi olla negatiivinen!
-
Koko graafin vaje
 on kaikkien :n osajoukkojen vajeiden maksimi. Koska niihin
kuuluu myös tyhjä joukko ja
on kaikkien :n osajoukkojen vajeiden maksimi. Koska niihin
kuuluu myös tyhjä joukko ja  , on
, on  .
.
-
Graafin täydellinen sovitus on sellainen, jossa jokaisesta
:n kärjestä
lähtee sivu ja sellainen on olemassa joss  kaikille (eli
kaikille (eli  ).
Täydellisen sovituksen etsimiseen on olemassa useita ns.
polunlaajennusalgoritmeja. Tässä eräs:
).
Täydellisen sovituksen etsimiseen on olemassa useita ns.
polunlaajennusalgoritmeja. Tässä eräs:
Käydään läpi kaikki kärjet
 :
:
Jos
:lle ei ole jo valittu
esittäjäsivua:
Käydään läpi
:ään
yhdistetyt kärjet  jotka eivät jo
kuulu sovitukseen:
jotka eivät jo
kuulu sovitukseen:
Jos löytyy
:hyn yhdistetty
kärki  joka ei jo kuulu sovitukseen:
joka ei jo kuulu sovitukseen:
Lisätään sivu
 sovitukseen ja palataan uloimpaan silmukkaan
sovitukseen ja palataan uloimpaan silmukkaan
-
Jos -kärjet korvataan joukoilla ja -kärjet niistä yhteen tai useampaan
kuuluvilla alkioilla (ts. ei käsitellä enää
varsinaista graafia vaan merkitään
“preferenssejä“ esim.
 ),
puhutaan täydellisen sovituksen sijaan joukkojen
),
puhutaan täydellisen sovituksen sijaan joukkojen  esittäjäsysteemistä.
esittäjäsysteemistä.
- Joskus sivuihin yhdistetään painot, jolloin yleinen ongelma on etsiä joko painojen summan maksimoiva (tai minimoiva) sovitus. Siihen sopii mm. unkarilainen algoritmi, joka iteroi graafin matriisiesitystä (sivujen painot matriisialkioina).
12Sekalaisia laskutekniikoita
12.1Induktiotodistus
-
Julistetaan induktiohypoteesi (esim.
 )
)
-
Induktion perusta: osoitetaan, että
 (tai
(tai  tai joku muu helppo
tapaus) on tosi (esim.
tai joku muu helppo
tapaus) on tosi (esim.  ).
).
-
Induktioaskel: osoitetaan, että jos induktiohypoteesi (tai -oletus)
 on tosi,
myös
on tosi,
myös  on tosi sijoittamalla :n toinen puoli :n
sisään ja pyörittelemällä algebrallisesti.
Esim.
on tosi sijoittamalla :n toinen puoli :n
sisään ja pyörittelemällä algebrallisesti.
Esim.

12.2Neliöksi täydentäminen
Esim. toisen asteen yhtälön ratkaisukaavan johtaminen:

12.3Osamurtokehitelmä
Jokaiselle rationaalifunktiolle  ( on alempaa astetta kuin
( on alempaa astetta kuin  ) voi
muodostaa osamurtokehitelmän
) voi
muodostaa osamurtokehitelmän  missä termit ovat muotoa
missä termit ovat muotoa  tai
tai  ja
ja  ja
ja  (jos
sallitaan
(jos
sallitaan  , jälkimmäistä muotoa ei
tarvita). Kehitelmästä on hyötyä varsinkin
integroinnissa.
, jälkimmäistä muotoa ei
tarvita). Kehitelmästä on hyötyä varsinkin
integroinnissa.
Aluksi faktoroidaan nimittäjä ensimmäisen tai toisen
asteen termeihin kaavalla  (tai sen
suoraviivaisella laajennuksella korkeamman asteen polynomeille).
Hajotelman termit määräytyvät saatujen
tekijöiden mukaan – tapauksia on kolme:
(tai sen
suoraviivaisella laajennuksella korkeamman asteen polynomeille).
Hajotelman termit määräytyvät saatujen
tekijöiden mukaan – tapauksia on kolme:
-
reaalinen (
 ), ei-toistuva juurilineaarinen nimittäjä, vakioarvoinen
osoittaja:
), ei-toistuva juurilineaarinen nimittäjä, vakioarvoinen
osoittaja:

-
imaginäärinen juuri
toisen asteen
nimittäjä, lineaarinen osoittaja:

-
-kertainen juuri termiä, joissa nimittäjän aste
laskee:


Hajotelman termien osoittajiin tulevat vakiot ( )
eli residyt (eng. residue)
voidaan lasskea monella tavalla. Seuraavat kolme tapaa on esitetty
kahden eri suuren, reaalisen juuren avulla (ts.
)
eli residyt (eng. residue)
voidaan lasskea monella tavalla. Seuraavat kolme tapaa on esitetty
kahden eri suuren, reaalisen juuren avulla (ts.  ),
mutta ne toimivat myös korkeamman asteen tapauksissa (ts.
),
mutta ne toimivat myös korkeamman asteen tapauksissa (ts.  ). Heavisiden menetelmää lukuunottamatta ne
toimivat myös moninkertaisille ja epälineaarisille
tapauksille.
). Heavisiden menetelmää lukuunottamatta ne
toimivat myös moninkertaisille ja epälineaarisille
tapauksille.
12.3.1Tapa 1: :n
valitseminen strategisesti
Lavennetaan osamurrot samannimisiksi alkuperäisen kanssa,
eliminoidaan nimittäjät ja ratkaistaan osoittajista
muodostuvan polynomin tuntemattomat ( )
valitsemalla aina siten, että se
hävittää kerrallaan yhden muuttujista:
)
valitsemalla aina siten, että se
hävittää kerrallaan yhden muuttujista:

Valitaan strategisesti  :
:

Sama temppu B:lle:  :
:

Eli:

12.3.2Tapa 2: yhtälöryhmä eri asteisista termeistä
Etsitään murtofunktiota vastaava yhtälö kuten
tavassa 1 ja ryhmitellään se :n
polynomiksi (tässä esimerkin vuoksi toisen asteen, vaikka
ensimmäisen asteenkin riittäisi):

Sitten tehdään :n eri asteisista
termeistä (vakiot, :t,  :t
yms) lineaarinen yhtälöryhmä:
:t
yms) lineaarinen yhtälöryhmä:

Ratkaistaan saatu lineaarinen yhtälöryhmä
(esimerkkinä näytetty turha  on
poistettu):
on
poistettu):

12.3.3Tapa 3: Heavisiden peittomenetelmä
Heavisiden menetelmä on helppo, mutta ei
toimi moninkertaisten ( ) eikä
epälineaaristen (
) eikä
epälineaaristen ( ) termien kanssa.
Murtofunktiota ei tarvitse vääntää
yhtälöksi kuten edellisissä tavoissa:
) termien kanssa.
Murtofunktiota ei tarvitse vääntää
yhtälöksi kuten edellisissä tavoissa:
Pyyhitään vain aina yksi tekijä pois
nimittäjästä ja sijoitetaan sen nollaamiseen tarvittava
vakio jäljelle jääneeseen kaavaan :n
tilalle. Poistettua tekijää vastaava residy saadaan suoraan:

12.4Logaritmi
-
Määritelmä:
 eli "mihin
potenssiin pitää korottaa, että
saadaan "
eli "mihin
potenssiin pitää korottaa, että
saadaan "
-
Ehdot: kantaluvulle
 ja
numerukselle
ja
numerukselle 
-

-

-

-
 . Esim.
. Esim.  .
.
-

-

-
 (eli kantaluvun vaihto)
(eli kantaluvun vaihto)
12.5Raja-arvo
-
Summa, erotus, tulo ja osamäärä ovat triviaaleja:

-

-
 :n raja-arvon saa jakamalla molemmat polynomit
nimittäjän korkeimman asteen muuttujalla. Esim:
:n raja-arvon saa jakamalla molemmat polynomit
nimittäjän korkeimman asteen muuttujalla. Esim: 
-
ääretöntä lähestyttäessä myös
neliöjuuresta voi usein päästä eroon vastaavalla
jakolaskulla:

-
polynomin raja-arvo(n merkki:
 )
äärettömyydessä määräytyy vain ja
ainoastaan korkeimman asteen tekijän mukaan, koska esim.
)
äärettömyydessä määräytyy vain ja
ainoastaan korkeimman asteen tekijän mukaan, koska esim. 
-
jotain ei-määrättyä arvoa lähestyvän raja-arvon saa yleensä joko faktoroimalla polynomeja juuriensa avulla tai viimeistäänkin muuttamalla laskun raja-arvoksi äärettömyydessä:
 tai
tai

 .
.
-
 eli "eksponentti voittaa potenssiin
korotuksen"
eli "eksponentti voittaa potenssiin
korotuksen"
-
 , eli "potenssiin korotus voittaa
logaritmin"
, eli "potenssiin korotus voittaa
logaritmin"
-
l'Hospitalin 1. sääntö:
 . Huom: toimii vain
. Huom: toimii vain  -muotoisille lauseille!
-muotoisille lauseille!
-
l'Hospitalin 2. sääntö:
 . Huom: toimii vain
. Huom: toimii vain  -muotoisille lauseille ja on
käytännöllinen vain
-muotoisille lauseille ja on
käytännöllinen vain  -muotoisille!
Tyyppien
-muotoisille!
Tyyppien  -muotoiset voi kuitenkin muuttaa
muotoon tai ottamalla
logartimin.
-muotoiset voi kuitenkin muuttaa
muotoon tai ottamalla
logartimin.
12.6Trigonometristen funktioiden ominaisuuksia



13Merkintätapoja
13.1Tavalliset lukujärjestelmät
-
= kokonaisluvut =

-
 = positiiviset kokonaisluvut =
= positiiviset kokonaisluvut = 
-
 = luonnolliset luvut =
= luonnolliset luvut = 
-
= rationaaliluvut

-
= reaaliluvut
-
= kompleksiluvut =

13.2Kreikkalaiset kirjaimet
(Roomalaisten kirjainten kanssa yhteiset merkit harmaalla, etsimisen helpottamiseksi.)
 |
 |
alfa |  |
 |
nyy | ||
 |
 |
beeta |  |
 |
ksii | ||
 |
 |
gamma |  |
 |
omikron | ||
 |
 |
delta | |
 |
pii | ||
 |
 |
epsilon |  |
 |
rhoo | ||
 |
 |
zeeta |  |
 |
sigma | ||
 |
 |
eeta |  |
 |
tau | ||
 |
 |
theeta |  |
 |
ypsilon | ||
 |
 |
ioota |  |
 |
fii | ||
 |
 |
kappa |  |
 |
khii | ||
|
|
lambda |  |
 |
psii | ||
 |
 |
myy |  |
 |
omega |
Hakemisto
ääriarvopisteiden luokittelu 22
ääriarvotehtävä
monen muuttujan 22
rajoitettu 22
2. asteen yhtälön ratkaisukaava 45
abelin ryhmä 27
affininen 13
affiniteetti 13
ahne algoritmi 43
aika-alue 18
algebra 27
alideterminanttikehitelmä 9
alirangas 28
alirengas
ideaali 28
aliryhmä 27
triviaali 27
alkuarvo-ongelma 15
alkuluku 39
pseudo- 41
vahva 41
suuri 41
alkulukuja
suhteellinen 39
alkulukukaksoset 41
analyyttinen 26
argumentti (kompleksiluvun) 26
aritmetiikan peruslause 39
aste
kärjen 42
lähtö- 42
tulo- 42
attraktiivisesti stabiili 17
avaruuspinta 21
Bellin luvut 31
binomikertoimet 32
yleistetyt 32
binomilause 32
bipartite graph 43
blokkikoodaus 30
Burnsiden lemma 37
Caleyn lause 37
Carmichaelin luku 41
Catalanin luvut 34
Cauchyn residuaalilause 27
Cauchyn tulo 20
Cauchy-Riemann 26
conformal mapping 26
curl 24
determinantti 8
Wronskian 16
diagonaali (matriisin) 6
diagonalisoituvuus 9
differenssiyhtälö 35
differentiaali 14
matriisilausekkeen 7
monen muttujan funktion 21
osittais- 15
differentiaaliyhtälö
1. kertaluvun lineearinen 16
eksakti 16
eksaktiksi muuttaminen 16
eksplisiittinen 15
linearisointi 18
-ryhmä, 1. asteen lin. homog. 17
separoituva 15
tasa-asteinen (homogenous) 15
tavallinen 15
tavallinen 2. asteen 17
differentiointi 14
Dijkstran minimipolkualgoritmi 43
dimensio (avaruuden) 6
Diophanteen yhtälö 40
distribuutiosäännöt 28
divergenssi 24
divergenssilause 24
ekvivalenssiluokka
kongruenssi 40
permutaatioryhmän 37
ekvivalentti koodaus 30
emäfunktio 32
eksponentiaalinen 33
tavallinen 32
enumerointi 32
epästabiili piste 17
erillisten syklien tulo 37
esittäjäsysteemi 43
Euklideen algoritmi 40
Eulerin
fii-funktio 41
kierros 42
lause 41
polku 42
Fermat'n pieni lause 41
Fibonaccin luvut 34
field 28
Fii-funktio 41
flux 23
Fourier-kosinisarja 20
Fourier-sarja 20
Fourier-sinisarja 21
fundamentaalikunta 30
funktioavaruus 6
Galois-kunta 30
Gaussin eliminaatio 8
Gaussin laki 24
Gauss-Jordan 7
gcd 39
generoiva funktio 32
generoiva matriisi 30
graafi 42
algoritmeja painotetuille 43
kaksijakoinen 43
komplementti 42
lineaarinen 42
multi- 42
painotettu 43
täydellinen 42
taso- 42
yhtenäinen 42
yksinkertainen 42
Gram-Smidth ortonormalisointi 9
Greenin lause 23
group 27
hajaantuminen 19
Hamiltonin kierros 42
Hamiltonin polku 42
Hamming-etäisyys 30
Hammingin matriisi 31
Hamming-koodaus 30
harmoninen (skalaarikenttä) 24
Heavisiden menetelmä 47
Hessian 22
homogeeniset koordinaatit 12
homomorfismi 27
rengas- 29
ideaalipiste 12
ideaalisuora 12
ideaalitaso 12
induktio
-askel 44
-hypoteesi 44
perusta 44
-todistus 44
Inkluusio-ekskluusio-periaate 32
integral domain 28
integroiva tekijä 16
inventaario 39
isocline 16
isomorfinen
graafi 42
isomorfismi 27
rengas- 29
jäännösluokka 40
Jacobian-matriisi 14
jaollisuus 39
-sääntöjä 39
johtokerroin 29
käänteisluokka 40
kärjen aste 42
ratkaisun (ODE) 16
kantaluku (logaritmin) 47
kantaluvun vaihto 47
karakteristinen polynomi
rekursion 36
karakteristinen polynomi (matriisin) 9
karasteristika (renkaan) 29
kertaluku
alkion 28
differentiaaliyhtälön 15
rekursion 35
ryhmän 27
ketjusääntö
monen muuttujan 15
kierros 42
kiintopiste 37
Kleinin ryhmä 28
kokonaisalue 28
kokonaisluvut 48
kombinaatio 31
kombinatoriikka 31
kommutatiivinen 27
kompleksiluku 26
kompleksiluvut 48
kompleksinen funktio 26
konfiguraatio
graafin 42
kongruenssi 40
-luokka 40
-yhtälö 40
konjugaatti 26
konservatiivinen vektorikenttä 23
koodisana 30
kooditeoria 30
korkea potenssi 40
kreikkalaiset kirjaimet 49
Kruskalin algoritmi 43
kunta 28
fundamentaali- 30
Galois- 30
Kuratowskin lause 42
kuvaus 12
affini 13
lineaari- 12
kyyhkyslakkaperiaate 31
lähde 24
lähtöaste 42
Lagrangen funktio 22
Lagrangen kerroin 22
Lagrangen lause 28
Laplace-muunnos 18
laplace-yhtälö 24
laplacian 24
lcm 40
least squares fit 13
Leibnizin lause 19
liikeryhmä 36
liittoluku 26
lineaarialgebra 6
lineaarialgebran aksioomat 6
lineaarikombinaatio 6
lineaarinen riippumattomuus (funktioiden) 16
linearisaatio 14
linearisointi 18
logaritmi
laskusääntöjä 47
luonnolliset luvut 48
Markovin ketju 13
matriisi
derivaatta 10
eksponentti 10
generoiva 30
normalisoitu 30
Hessian 22
Jacobian 14
käänteis- 7
ortogonaalinen 6
-rengas 29
säännöllinen 6
singulaarinen 6
stokastinen 14
tarkistus- 30
tulo 6
matriisifunktiot 10
metsä 42
Millerin testi 41
moduli (kompleksiluvun) 26
monoidi 27
multigraafi 42
multinomikertoimet 32
multinomilause 32
naapurisolmu 42
nabla 24
napa 26
napakoordinaatisto 22
neliöksi täydentäminen 44
neutraalialkio 27
nollapolynomi 29
nollatekijä
aito 28
normi (matriisin) 6
nullcline 16
numerus 47
ODE 15
ominaisarvo 9
ominaisvektori 9
order 27
oribitaalisesti stabiili 18
ortonormaali 9
ortonormalisointi 9
ortonormeerattu 6
osittaisderivaatta 21
osittaisdifferentiaali 15
ositus 34
pääarvo (kompleksiluvun) 26
painopiste 11
palautuskaava 35
parillinen funktio 20
pariton funktio 20
Pascalin kolmio 32
peräkkäiset sijoitukset 8
permutaatio 31
erilliset esittäjät 37
matriisiesitys 37
-ryhmä 37
toisto- 31
permutaatioryhmä 36
Picardin iteraatio 17
Picardin lause 17
pienimmän neliösumman sovitus 13
pienin yhteinen jaettava 40
pistetulo 10
polaariesitys (kompleksiluvun) 26
pole 26
polku 42
Polyan lause 37
polynomitulo
normeerattu 29
positiivisesti orientoitu 26
potenssi 27
korkea 40
potenssisarja 20
laskusäännöt 34
potentiaali 22
-vektori 23
Primin algoritmi 43
projektiivinen avaruus 12
projektiivinen taso 12
projektio 12
ortogonaalinen 12
-säde 12
-taso 12
yhdensuuntais 12
pseudoalkuluku 41
puoliryhmä 27
puu 42
pyj 40
Rabinin todennäköisyystesti 41
raja-arvo
laskusääntöjä 48
monen muuttujan 21
rangi 6
rank 6
rankki 6
rata 37
rationaaliluvut 48
reaaliluvut 48
redusoimattomuus 29
suhteellinen 29
redusoituvuus 29
rekurrenssiyhtälö 35
rekursio 35
rengas 28
kommutatiivinen 28
matriisi- 29
polynomi- 29
rengashomomorfismi 29
residue 45
residy 45
reuna-arvo-ongelma 15
ring 28
ristioperaattori 11
ristitulo 11
-matriisi 11
rook polynomial 34
roottori 24
RSA-salakirjoitus 42
ryhmä 27
Kleinin 28
syklinen 27
ryhmäkoodi 30
säännöllisyysaste 6
Fourier- 20
harmoninen 20
potenssi- 20
Taylorin 20
semigroup 27
silmukka 42
similaarisuus 10
similariteettimuunnos 9
sink 26
sisätulo 11
skalaarikenttä 22
harmoninen 24
skalaarikolmitulo 11
skalaaritulo 10
source 24
sovitus
kaksijakoisen graafin 43
stabiili piste 17
stabilisaattori 37
s-taso 19
Stokesin lause 24
Strilingin luvut, 2. lajin 31
sulkeuma 42
suora 11
ideaali- 12
normaalimuoto 11
painopistekoordinaatit 11
parametrimuoto 11
-parvi 11
-viuhka 11
suora tulo 27
absoluuttinen 19
ehdollinen 19
testaus 19
suppenemisintervalli 20
suppenemiskeskus 20
suuntakenttä 16
suurin yhteinen tekijä 39
sykli-indeksi 37
syklinen järjestys 37
syklinen ryhmä 27
symmetrinen ryhmä 37
syndrooma 30
systemaattinen 30
syt 39
täydellinen sovitus 43
tarkistusmatriisi 30
tasa-arvokäyrä 16
tasapainopiste 17
taso 11
ideaali- 12
normaalimuoto 11
painopistekoordinaatit 11
parametrimuoto 11
projektiivinen 12
Taylorin sarja 20
tehosuhde (koodauksen) 30
tetraedri 12
toistopermutaatio 31
transformaatio 12
transpoosi 6
tulo
Cauchyn 20
formaali 24
matriisi- 7
piste-/skalaari-/sisä- 10
polynomi- 30
risti- 11
skalaarikolmi- 11
suora 27
vektori- 10
tuloaste 42
työ 23
ulottuvuus (osajoukon) 43
unkarilainen algoritmi 44
väärinjärjestys 31
vahva pseudoalkuluku 41
vaihekulma 26
vaje 43
vakiotermi 29
vasta-alkio 27
vektorikenttä 22
konservatiivinen 23
vektoripotentiaali 22
suljetun käyrän) 24
virheen paino 30
virherakenne 30
virittää (ryhmä) 27
vuo 23
Wilsonin lause 40
Wronskian-determinantti 16
ydin 12
ydin (lineaarikuvauksen) 6
yhdensuuntaissärmiö 13
yhdistetty solmu 42
ykkösalkio 28
yksikkö 28
ylimäärätty yhtälöryhmä 13
yritefunktio 35